 |
|
���������� ������:: ����� ����� �������� :: ������� ������ :: �������� ����� :: ��� :: ������ ����� ���� :: ������� ��� ���������� :: ������ ����� :: ������ ���� :: ������� ���� :: ���� ��������� ���������� �����:: ����� ���� :: ���������� �� ������� Windows XP :: ������ � �������, ��� �� ������ ����� ������ :: ����� ����� :: �������� ������� :: ������� �������� :: �� ������ :: ������� ������ :: ��������, ��� ������� �������� ���������� �������� :: ����� ����� ������� (����� 1) |
������� ��������� ������������ (��)ModernLib.Net / ������������ / ��� / ������� ��������� ������������ (��) - ������ (���. 59)
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов «распознавания» защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з. Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) - применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени ). На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1не способно различить КЗ в точках K 1и K 2 .Последние ступени Р. з. (в Р. з., показанной на рис. 1 , - третьи) - резервные, у них часто нет четко ограниченной зоны срабатывания. В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными - срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К( рис. 2 ) могут сработать только устройства 1, 3, 4и 6.При этом устройства 1и 3( 4и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени. В ряде случаев - на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кви выше - для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце «своего» и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем - току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 кминформация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии. Лит.:Атабеков Г. И., Теоретические основы релейной защиты высоковольтных сетей, М, - Л., 1957; Федосеев А. И., Основы релейной защиты, 2 изд., М. - Л., 1961; Руководящие указания по релейной защите, в. 1-9, М. - Л., 1961-72; Федосеев А. М., Релейная защита электрических систем, М., 1975. Э. П. Смирнов. 
Рис. 2. Схема релейной защиты сети с двусторонним питанием; А, Б, В, Г - сборные шины подстанций; Г - источники питания; 1 - 6 - устройства релейной защиты; К - точка короткого замыкания. 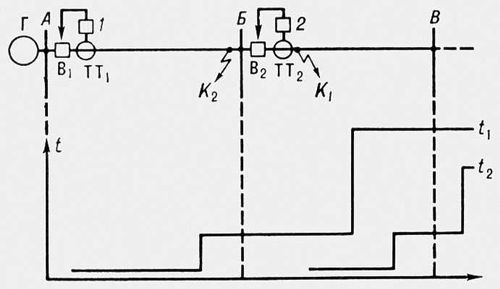
Рис. 1. Схема участка радиальной электрической сети с односторонним питанием, оснащенного относительно селективной релейной защитой, и соответствующие выдержки времени: А, Б, В, - сборные шины подстанций; В - выключатели; Г - источник питания; ТТ - трансформаторы тока; 1, 2 - устройства линейной защиты; К - точки короткого замыкания; t - выдержка времени; по оси абсцисс отложено расстояние вдоль линии. Релейная система Реле'йная систе'мав управлении, автоматическая система управления, в которой имеется хотя бы одно звено, обладающее релейной характеристикой.Р. с. является одним из видов нелинейных дискретных автоматических систем управления. Различают двухпозиционные (см. Двухпозиционный регулятор ) и многопозиционные Р. с. Принципиальная особенность двухпозиционных Р. с. - наличие у них автоколебаний выходного (регулируемого) параметра в установившемся режиме (т. е. после окончания переходных процессов ); амплитуда и период автоколебаний определяются релейной характеристикой применяемого релейного элемента , а также динамическими характеристиками объекта управления, исполнительных механизмов, измерительных и преобразующих устройств, входящих в автоматическую систему управления. Р. с. относительно просты в изготовлении и эксплуатации, имеют низкую стоимость; использование бесконтактных релейных элементов повышает надёжность системы. Р. с. широко применяют при управлении различными технологическими процессами. Релейная форсировка возбуждения Реле'йная форсиро'вка возбужде'ния,процесс усиления возбуждения синхронных генераторов, компенсаторов и электродвигателей, осуществляемый и контролируемый автоматическими устройствами. При этом ток возбуждения электрической машины и, как следствие, эдс в обмотках статора увеличиваются с максимально возможной скоростью до наибольшего технически допустимого уровня. Р. ф. в. необходима при резком снижении напряжения, обычно обусловливаемом коротким замыканием в электроэнергетической системе. При коротком замыкании (в аварийном режиме) и после отключения поврежденного участка (в послеаварийном режиме) Р. ф. в. обеспечивает подъём напряжения и повышение динамической устойчивости электроэнергетической системы, что ведёт к скорейшему восстановлению нормального режима её работы. В ряде случаев для предотвращения опасных перенапряжений (например, при аварийных отключениях нагрузки) производится, наоборот, релейная расфорсировка (снижение возбуждения) генераторов. Устройства Р. ф. в. входят в состав систем автоматического регулирования возбуждения.
Лит.:Веников В. А., Переходные электромеханические процессы в электрических системах, 2 изд., М., 1970; Барзам А. Б., Системная автоматика, 3 изд., М., 1973. Н. И. Овчаренко. Релейная характеристика Реле'йная характери'стика, характеристика кусочно-линейного вида, соответствующая преобразованию в техническом устройстве (системе) непрерывной входной величины хв дискретные значения выходной величины y n, где n -число возможных её значений (уровней), обычно равное 2 или 3. На рис . приведены Р. х. основных типов: Р. х. идеальных ( а, б) и реальных ( в, г) двухпозиционных ( n= 2) и трёхпозиционных ( n= 3) релейных элементов.У Р. х. типов в, гимеется зона гистерезиса (неоднозначности): при изменении хв областях x 1Ј xЈ x 2( рис. , в) или x 1Ј xЈ x 2, x 3Ј xЈ x 4( рис. , г) ход зависимости y( x) определяется не только величиной, но и направлением изменения х.Значение х, при котором ускачком переходит от одного значения к другому, называется порогом срабатывания. Р. х. типа вимеют, например, простейшие двухпозиционные электромагнитные реле,а Р. х. типа г -трёхпозиционные поляризованные реле. Элементы с Р. х. широко используются при квантовании сигналов по уровню и в релейных системах автоматического управления. Лит.см. при ст. Релейный элемент. А. В. Кочеров. 
Релейные характеристики двухпозиционных (а, в) и трехпозиционных (б, г) релейных элементов. Релейный элемент Реле'йный элеме'нт,минимальная совокупность деталей и связей между ними, имеющая релейную характеристику , т. е. скачкообразно изменяющая воздействие на выходе (выходах) при поступлении фиксированных воздействий на вход (входы). При построении дискретных управляющих устройств (например, релейных, см. Реле ) Р. э. рассматривается как их наиболее простая составная часть. Р. э. характеризуются порогом срабатывания - минимальным абсолютным значением возрастающего входного воздействия, при котором Р. э. изменяет своё состояние и одновременно изменяет воздействие на выходе в соответствии с релейной характеристикой, и порогом отпускания - минимальным абсолютным значением уменьшающегося входного воздействия, при котором Р. э. возвращается в первоначальное состояние. Однако некоторые Р. э. могут обладать свойством фиксации, т.е. оставаться в занятом ими состоянии и после снятия воздействия на входе. В этом случае Р. э. возвращается в первоначальное состояние обычно после подачи воздействия на др. его вход (или воздействия др. знака на тот же вход). Р. э. с фиксацией применяют, например, для реализации памяти вычислительных и управляющих машин. Характеристикой Р. э. служит также его быстродействие, определяемое временем срабатывания и временем отпускания, или возврата. В современных бесконтактных элементах время срабатывания и время отпускания достигает несколько нсек.Важные характеристики Р. э. - потребление энергии, масса, занимаемый объём. Существует большое количество различных типов Р. э.: от силовых Р. э., коммутирующих токи ~10-10 2 апри напряжениях ~ 10 4-10 3 вс быстродействием ~ 10 -1 сек, до контактных и бесконтактных Р. э. для управляющих и контрольных автоматических устройств, реагирующих на токи ~ 10 -4 апри напряжениях ~ 10 -1 ви имеющих быстро действие ~ 10 -4 сек. С конструктивной точки зрения в Р. э. выделяют воспринимающие органы, которые реагируют на внешние воздействия, исполнительные - предназначенные для передачи воздействий от Р. э. вовне, и промежуточные - перерабатывающие и передающие воздействия от воспринимающих органов к исполнительным. Эти органы могут быть или явно выраженными или объединёнными друг с другом. По виду исполнительных органов Р. э. разделяют на контактные, в которых исполнительными органами служат электрические контакты, коммутирующие электрической цепи, и бесконтактные (электрические, пневматические и др.), в которых выходное воздействие формируется изменением различных параметров выходных цепей, например сопротивления, ёмкости, индуктивности, или изменением напряжения, давления и т. п. в этих цепях. В бесконтактных Р. э. релейная характеристика или органически присуща им (как, например, в Р. э. с прямоугольной петлей гистерезиса, в лампах тлеющего разряда, в тиратронах и криотронах), или же получается в результате соответствующего соединения электрических элементов, которые сами по себе не имеют релейной характеристики (как это, например, имеет место в триггерных Р. э.). Бесконтактные Р. э. обычно значительно меньше контактных по размерам (современная технология позволяет, например, изготовлять до 10 4полупроводниковых Р. э. на тонкой кремниевой пластине размером 4х4,5 мм), более надёжны в работе, потребляют меньшую мощность и обладают более высоким быстродействием. Р. э. классифицируют также по многим др. признакам, чаще всего - по виду используемых в них физических явлений, характеру величин, на которые они реагируют, функциям, выполняемым ими в релейной системе , назначению. Физическое явление, используемое в Р. э., определяет его принцип действия, конструкцию и основные характеристики. С этой точки зрения Р. э. разделяют на электрические, действие которых основано на явлениях, вызванных протеканием электрического тока, наличием электрического поля или связанных с электрической проводимостью твёрдого тела; механические, в которых используется главным образом изменение размеров твёрдого тела под влиянием тех или иных факторов (к механическим обычно относят также гидравлические и пневматические Р. э.); химические, в которых используются преимущественно химические преобразования, происходящие под воздействием электрического тока; оптические, использующие процессы, происходящие под действием света (подробнее см. рис. 1 ). По виду физических величин, на которые реагируют Р. э., они делятся на электрические, механические, тепловые, оптические, магнитные и акустические ( рис. 2 ). Часто Р. э., которые должны реагировать на неэлектрические величины, дополняются измерительными преобразователями соответствующих величин. В зависимости от характера изменения физических величин различают: Р. э. знака величины, реагирующие на определённое значение и знак какой-либо величины; Р. э. увеличения и уменьшения величины; предельные Р. э., реагирующие на изменение данной величины при выходе её значения из заданных пределов; Р. э. соотношения, реагирующие на сумму (разность, отношение, производную, интеграл и т.п.) двух или нескольких величин, воздействующих на входы Р. э. Особое место занимают импульсные Р. э., получившие распространение в связи с развитием импульсной техники ; они реагируют на различные параметры импульсов (продолжительность, крутизну переднего или заднего фронта, форму, скважность и т. д.). В зависимости от местоположения в релейных устройствах и выполняемых функций Р. э. подразделяют на воспринимающие, исполнительные и промежуточные. Если воспринимающие элементы принимают воздействия, поступающие из линий (каналов) связи, то их часто называют линейными. Функции, выполняемые Р. э., и их назначение в различных областях применения весьма разнообразны. Поэтому их часто классифицируют в каждой области по-разному. Однако можно выделить большую группу защитных Р. э., предназначенных для отключения или изменения режима работы производственных и др. агрегатов в случаях, когда режим становится опасным для них, группы управляющих и контрольных Р. э. автоматических систем, а также логические Р. э., выполняющие функции логических преобразователей в вычислительных и управляющих машинах, дискретных управляющих устройствах и т. п. Р. э. наиболее широко применяют в технике автоматического управления и технике связи; с их помощью можно: управлять большими мощностями на выходах устройств (систем), используя весьма малые по величине воздействия на входах; выполнять логические операции; путём сочетания различных Р. э. легко образовывать сложные многофункциональные релейные устройства (содержащие десятки и сотни тыс. Р. э.). Многие технические устройства и системы (вычислительные и управляющие машины дискретного действия, дискретные телемеханические устройства, управляющие системы автоматической телефонии, системы передачи дискретной информации, устройства релейной защиты и др.) целиком или в значительной степени базируются на использовании Р. э. Лит.:Терминология реле, М., 1958; Сотсков Б. С., Основы расчета и проектирования электромеханических элементов автоматических и телемеханических устройств, М. - Л., 1965; Агейкин Д. И., Костина Е. Н., Кузнецова Н. Н., Датчики систем автоматического контроля и регулирования, М., 1959; Васильева Н. П., Гашковец И. С., Логические элементы в промышленной автоматике, М. - Л., 1962; Шорыгин А. П., Электрохимические элементы (общие свойства и классификация), в кн.: Энциклопедия измерений, контроля и автоматизации, в. 8, М., 1967; Цыпкин Я. З., Релейные автоматические системы, М., 1974. М. А. Гаврилов. 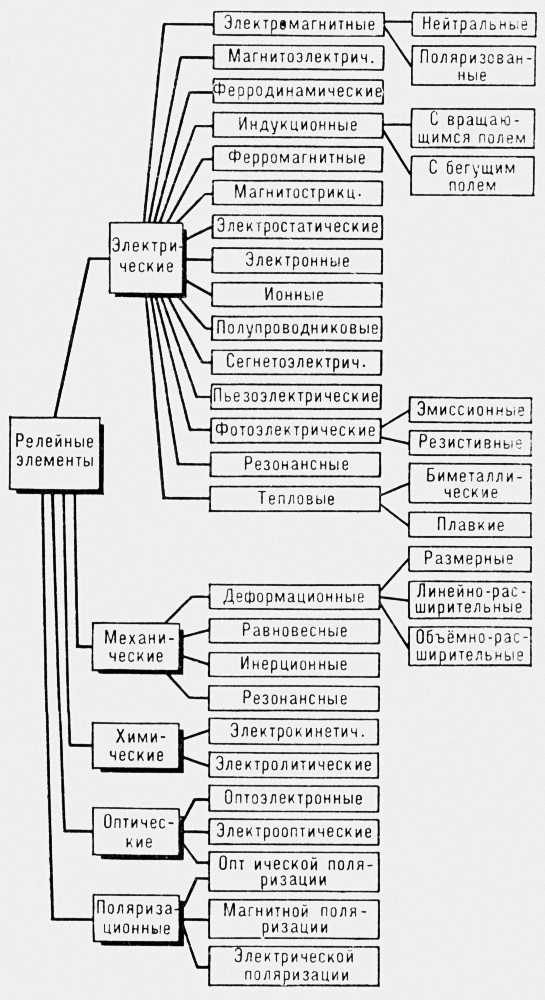
Рис. 1. Классификация релейных элементов по виду физических явлений, используемых для их действия. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98, 99, 100, 101, 102, 103, 104, 105, 106, 107 |
|||||||