Архитектура операционной системы UNIX
ModernLib.Net / Интернет / Бах Морис / Архитектура операционной системы UNIX - Чтение
(стр. 17)
|
Автор:
|
Бах Морис |
|
Жанр:
|
Интернет |
|
-
Читать книгу полностью
(2,00 Мб)
- Скачать в формате fb2
(764 Кб)
- Скачать в формате doc
(336 Кб)
- Скачать в формате txt
(288 Кб)
- Скачать в формате html
(762 Кб)
- Страницы:
1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37
|
|
dup(to_par[0]); /* дублирование дескриптора записи в канал в позицию стандартного вывода */
close(to_par[1]); /* закрытие ненужных дескрипторов канала */
close(to_chil[0]);
close(to_par[0]);
close(to_chil[1]);
for (;;)
{
if ((count = read(0, buf, sizeof(buf))) == 0)
exit();
write(1, buf, count);
}
} /* выполнение родительского процесса */
close(1);
/* перенастройка стандартного ввода-вывода */
dup(to_chil[1]);
close(0);
dup(to_par[0]);
close(to_chil[1]);
close(to_par[0]);
close(to_chil[0]);
close(to_par[1]);
for (i = 0; i ‹ 15; i++)
{
write(1, string, strlen(string));
read(0, buf, sizeof(buf));
}
}
Рисунок 7.5. Использование функций pipe, dup и fork
Результаты этой программы не зависят от того, в какой очередности процессы выполняют свои действия. Таким образом, нет никакой разницы, возвращается ли управление родительскому процессу из функции fork раньше или позже, чем порожденному процессу. И так же безразличен порядок, в котором процессы вызывают системные функции перед тем, как войти в свой собственный цикл, ибо они используют идентичные структуры ядра. Если процесс-потомок исполняет функцию read раньше, чем его родитель выполнит write, он будет приостановлен до тех пор, пока родительский процесс не произведет запись в канал и тем самым не возобновит выполнение потомка. Если родительский процесс записывает в канал до того, как его потомок приступит к чтению из канала, первый процесс не сможет в свою очередь считать данные из стандартного ввода, пока второй процесс не прочитает все из своего стандартного ввода и не произведет запись данных в стандартный вывод. С этого места порядок работы жестко фиксирован: каждый процесс завершает выполнение функций read и write и не может выполнить следующую операцию read до тех пор, пока другой процесс не выполнит пару read-write. Родительский процесс после 15 итераций завершает работу; порожденный процесс наталкивается на конец файла («end-of-file»), поскольку канал не связан больше ни с одним из записывающих процессов, и тоже завершает работу. Если порожденный процесс попытается произвести запись в канал после завершения родительского процесса, он получит сигнал о том, что канал не связан ни с одним из процессов чтения. Мы упомянули о том, что хорошей традицией в программировании является закрытие ненужных файловых дескрипторов. В пользу этого говорят три довода. Во-первых, дескрипторы файлов постоянно находятся под контролем системы, которая накладывает ограничение на их количество. Во-вторых, во время исполнения порожденного процесса присвоение дескрипторов в новом контексте сохраняется (в чем мы еще убедимся). Закрытие ненужных файлов до запуска процесса открывает перед программами возможность исполнения в «стерильных» условиях, свободных от любых неожиданностей, имея открытыми только файлы стандартного ввода-вывода и ошибок. Наконец, функция read для канала возвращает признак конца файла только в том случае, если канал не был открыт для записи ни одним из процессов. Если считывающий процесс будет держать дескриптор записи в канал открытым, он никогда не узнает, закрыл ли записывающий процесс работу на своем конце канала или нет. Вышеприведенная программа не работала бы надлежащим образом, если бы перед входом в цикл выполнения процессом-потомком не были закрыты дескрипторы записи в канал.
7.2 СИГНАЛЫ
Сигналы сообщают процессам о возникновении асинхронных событий. Посылка сигналов производится процессами — друг другу, с помощью функции kill, — или ядром. В версии V (вторая редакция) системы UNIX существуют 19 различных сигналов, которые можно классифицировать следующим образом: • Сигналы, посылаемые в случае завершения выполнения процесса, то есть тогда, когда процесс выполняет функцию exit или функцию signal с параметром death of child (гибель потомка); • Сигналы, посылаемые в случае возникновения вызываемых процессом особых ситуаций, таких как обращение к адресу, находящемуся за пределами виртуального адресного пространства процесса, или попытка записи в область памяти, открытую только для чтения (например, текст программы), или попытка исполнения привилегированной команды, а также различные аппаратные ошибки; • Сигналы, посылаемые во время выполнения системной функции при возникновении неисправимых ошибок, таких как исчерпание системных ресурсов во время выполнения функции exec после освобождения исходного адресного пространства (см. раздел 7.5); • Сигналы, причиной которых служит возникновение во время выполнения системной функции совершенно неожиданных ошибок, таких как обращение к несуществующей системной функции (процесс передал номер системной функции, который не соответствует ни одной из имеющихся функций), запись в канал, не связанный ни с одним из процессов чтения, а также использование недопустимого значения в параметре «reference» системной функции lseek. Казалось бы, более логично в таких случаях вместо посылки сигнала возвращать код ошибки, однако с практической точки зрения для аварийного завершения процессов, в которых возникают подобные ошибки, более предпочтительным является именно использование сигналов
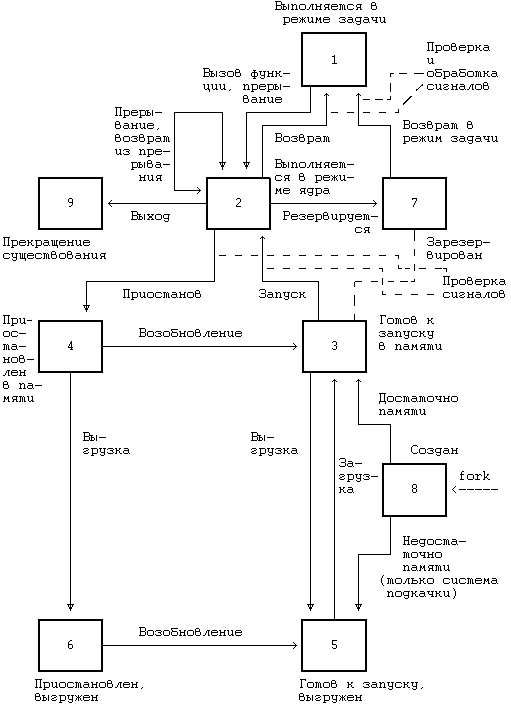
; • Сигналы, посылаемые процессу, который выполняется в режиме задачи, например, сигнал тревоги (alarm), посылаемый по истечении определенного периода времени, или произвольные сигналы, которыми обмениваются процессы, использующие функцию kill; • Сигналы, связанные с терминальным взаимодействием, например, с «зависанием» терминала (когда сигнал-носитель на терминальной линии прекращается по любой причине) или с нажатием клавиш «break» и «delete» на клавиатуре терминала; • Сигналы, с помощью которых производится трассировка выполнения процесса. Условия применения сигналов каждой группы будут рассмотрены в этой и последующих главах. Концепция сигналов имеет несколько аспектов, связанных с тем, каким образом ядро посылает сигнал процессу, каким образом процесс обрабатывает сигнал и управляет реакцией на него. Посылая сигнал процессу, ядро устанавливает в единицу разряд в поле сигнала записи таблицы процессов, соответствующий типу сигнала. Если процесс находится в состоянии приостанова с приоритетом, допускающим прерывания, ядро возобновит его выполнение. На этом роль отправителя сигнала (процесса или ядра) исчерпывается. Процесс может запоминать сигналы различных типов, но не имеет возможности запоминать количество получаемых сигналов каждого типа. Например, если процесс получает сигнал о «зависании» или об удалении процесса из системы, он устанавливает в единицу соответствующие разряды в поле сигналов таблицы процессов, но не может сказать, сколько экземпляров сигнала каждого типа он получил. Ядро проверяет получение сигнала, когда процесс собирается перейти из режима ядра в режим задачи, а также когда он переходит в состояние приостанова или выходит из этого состояния с достаточно низким приоритетом планирования (см.Рисунок 7.6). Ядро обрабатывает сигналы только тогда, когда процесс возвращается из режима ядра в режим задачи. Таким образом, сигнал не оказывает немедленного воздействия на поведение процесса, исполняемого в режиме ядра. Если процесс исполняется в режиме задачи, а ядро тем временем обрабатывает прерывание, послужившее поводом для посылки процессу сигнала, ядро распознает и обработает сигнал по выходе из прерывания. Таким образом, процесс не будет исполняться в режиме задачи, пока какие-то сигналы остаются необработанными. На Рисунке 7.7 представлен алгоритм, с помощью которого ядро определяет, получил ли процесс сигнал или нет. Условия, в которых формируются сигналы типа «гибель потомка», будут рассмотрены позже. Мы также увидим, что процесс может игнорировать отдельные сигналы, если воспользуется функцией signal. В алгоритме issig ядро просто гасит индикацию тех сигналов, на которые процесс не желает обращать внимание, и привлекает внимание процесса ко всем остальным сигналам.
Рисунок 7.6. Диаграмма переходов процесса из состояние в состояние с указанием моментов проверки и обработки сигналов
алгоритм issig /* проверка получения сигналов */
входная информация: отсутствует
выходная информация:
«истина», если процесс получил сигналы, которые его интересуют
«ложь» — в противном случае
{
do while (поле в записи таблицы процессов, содержащее индикацию о получении сигнала, хранит ненулевое значение)
{
найти номер сигнала, посланного процессу;
if (сигнал типа «гибель потомка»)
{
if (сигналы данного типа игнорируются)
освободить записи таблицы процессов, которые соответствуют потомкам, прекратившим существование;
else
if (сигналы данного типа принимаются)
return (true);
}
else
if (сигнал не игнорируется) return (true);
сбросить (погасить) сигнальный разряд, установленный в соответствующем поле таблицы процессов, хранящем индикацию получения сигнала;
}
return (false);
}
Рисунок 7.7. Алгоритм опознания сигналов
7.2.1 Обработка сигналов
Ядро обрабатывает сигналы в контексте того процесса, который получает их, поэтому чтобы обработать сигналы, нужно запустить процесс. Существует три способа обработки сигналов: процесс завершается по получении сигнала, не обращает внимание на сигнал или выполняет особую (пользовательскую) функцию по его получении. Реакцией по умолчанию со стороны процесса, исполняемого в режиме ядра, является вызов функции exit, однако с помощью функции signal процесс может указать другие специальные действия, принимаемые по получении тех или иных сигналов. Синтаксис вызова системной функции signal:
oldfunction = signal(signum, function);
где signum — номер сигнала, при получении которого будет выполнено действие, связанное с запуском пользовательской функции, function — адрес функции, oldfunction — возвращаемое функцией значение. Вместо адреса функции процесс может передавать вызываемой процедуре signal числа 1 и 0: если function = 1, процесс будет игнорировать все последующие поступления сигнала с номером signum (особый случай, связанный с игнорированием сигнала «гибель потомка», рассматривается в разделе 7.4), если = 0 (значение по умолчанию), процесс по получении сигнала в режиме ядра завершается. В пространстве процесса поддерживается массив полей для обработки сигналов, по одному полю на каждый определенный в системе сигнал. В поле, соответствующем сигналу с указанным номером, ядро сохраняет адрес пользовательской функции, вызываемой по получении сигнала процессом. Способ обработки сигналов одного типа не влияет на обработку сигналов других типов.
алгоритм psig /* обработка сигналов после проверки их существования */
входная информация: отсутствует
выходная информация: отсутствует
{
выбрать номер сигнала из записи таблицы процессов;
очистить поле с номером сигнала;
if (пользователь ранее вызывал функцию signal, с помощью которой сделал указание игнорировать сигнал данного типа)
return;
if (пользователь указал функцию, которую нужно выполнить по получении сигнала)
{
из пространства процесса выбрать пользовательский виртуальный адрес функции обработки сигнала;
/* следующий оператор имеет нежелательные побочные эффекты */
очистить поле в пространстве процесса, содержащее адрес функции обработки сигнала;
внести изменения в пользовательский контекст:
искусственно создать в стеке задачи запись, имитирующую обращение к функции обработки сигнала;
внести изменения в системный контекст:
записать адрес функции обработки сигнала в поле счетчика команд, принадлежащее сохраненному регистровому контексту задачи;
return;
}
if (сигнал требует дампирования образа процесса в памяти)
{
создать в текущем каталоге файл с именем «core»;
переписать в файл «core» содержимое пользовательского контекста;
}
немедленно запустить алгоритм exit;
}
Рисунок 7.8. Алгоритм обработки сигналов
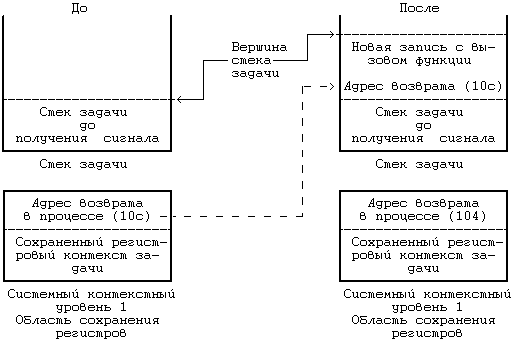
Обрабатывая сигнал (Рисунок 7.8), ядро определяет тип сигнала и очищает (гасит) разряд в записи таблицы процессов, соответствующий данному типу сигнала и установленный в момент получения сигнала процессом. Если функции обработки сигнала присвоено значение по умолчанию, ядро в отдельных случаях перед завершением процесса сбрасывает на внешний носитель (дампирует) образ процесса в памяти (см. упражнение 7.7). Дампирование удобно для программистов тем, что позволяет установить причину завершения процесса и посредством этого вести отладку программ. Ядро дампирует состояние памяти при поступлении сигналов, которые сообщают о каких-нибудь ошибках в выполнении процессов, как например, попытка исполнения запрещенной команды или обращение к адресу, находящемуся за пределами виртуального адресного пространства процесса. Ядро не дампирует состояние памяти, если сигнал не связан с программной ошибкой. Например, прерывание, вызванное нажатием клавиш «delete» или «break» на терминале, имеет своим результатом посылку сигнала, который сообщает о том, что пользователь хочет раньше времени завершить процесс, в то время как сигнал о «зависании» является свидетельством нарушения связи с регистрационным терминалом. Эти сигналы не связаны с ошибками в протекании процесса. Сигнал о выходе (quit), однако, вызывает сброс состояния памяти, несмотря на то, что он возникает за пределами выполняемого процесса. Этот сигнал, обычно вызываемый одновременным нажатием клавиш ‹Ctrl/|›, дает программисту возможность получать дамп состояния памяти в любой момент после запуска процесса, что бывает необходимо, если процесс попадает в бесконечный цикл выполнения одних и тех же команд (зацикливается). Если процесс получает сигнал, на который было решено не обращать внимание, выполнение процесса продолжается так, словно сигнала и не было. Поскольку ядро не сбрасывает значение соответствующего поля, свидетельствующего о необходимости игнорирования сигнала данного типа, то когда сигнал поступит вновь, процесс опять не обратит на него внимание. Если процесс получает сигнал, реагирование на который было признано необходимым, сразу по возвращении процесса в режим задачи выполняется заранее условленное действие, однако прежде чем перевести процесс в режим задачи, ядро еще должно предпринять следующие шаги: 1. Ядро обращается к сохраненному регистровому контексту задачи и выбирает значения счетчика команд и указателя вершины стека, которые будут возвращены пользовательскому процессу. 2. Сбрасывает в пространстве процесса прежнее значение поля функции обработки сигнала и присваивает ему значение по умолчанию. 3. Создает новую запись в стеке задачи, в которую, при необходимости выделяя дополнительную память, переписывает значения счетчика команд и указателя вершины стека, выбранные ранее из сохраненного регистрового контекста задачи. Стек задачи будет выглядеть так, как будто процесс произвел обращение к пользовательской функции (обработки сигнала) в той точке, где он вызывал системную функцию или где ядро прервало его выполнение (перед опознанием сигнала). 4. Вносит изменения в сохраненный регистровый контекст задачи: устанавливает значение счетчика команд равным адресу функции обработки сигнала, а значение указателя вершины стека равным глубине стека задачи. Таким образом, по возвращении из режима ядра в режим задачи процесс приступит к выполнению функции обработки сигнала; после ее завершения управление будет передано на то место в программе пользователя, где было произведено обращение к системной функции или произошло прерывание, тем самым как бы имитируется выход из системной функции или прерывания. В качестве примера можно привести программу (Рисунок 7.9), которая принимает сигналы о прерывании (SIGINT) и сама посылает их (в результате выполнения функции kill). На Рисунке 7.10 представлены фрагменты программного кода, полученные в результате дисассемблирования загрузочного модуля в операционной среде VAX 11/780. При выполнении процесса обращение к библиотечной процедуре kill имеет адрес (шестнадцатеричный) ee; эта процедура в свою очередь, прежде чем вызвать системную функцию kill, исполняет команду chmk (перевести процесс в режим ядра) по адресу 10a. Адрес возврата из системной функции — 10c. Во время исполнения системной функции ядро посылает процессу сигнал о прерывании. Ядро обращает внимание на этот сигнал тогда, когда процесс собирается вернуться в режим задачи, выбирая из сохраненного регистрового контекста адрес возврата 10c и помещая его в стек задачи. При этом адрес функции обработки сигнала, 104, ядро помещает в сохраненный регистровый контекст задачи. На Рисунке 7.11 показаны различные состояния стека задачи и сохраненного регистрового контекста. В рассмотренном алгоритме обработки сигналов имеются некоторые несоответствия. Первое из них и наиболее важное связано с очисткой перед возвращением процесса в режим задачи того поля в пространстве процесса, которое содержит адрес пользовательской функции обработки сигнала. Если процессу снова понадобится обработать сигнал, ему опять придется прибегнуть к помощи системной функции signal. При этом могут возникнуть нежелательные последствия: например, могут создаться условия для конкуренции, если второй раз сигнал поступит до того, как процесс получит возможность запустить системную функцию. Поскольку процесс выполняется в режиме задачи, ядру следовало бы произвести переключение контекста, чтобы увеличить тем самым шансы процесса на получение сигнала до момента сброса значения поля функции обработки сигнала.
#include ‹signal.h›
main()
{
extern catcher();
signal(SIGINT, catcher);
kill(0, SIGINT);
}
catcher()
{
}
Рисунок 7.9. Исходный текст программы приема сигналов
**** VAX DISASSEMBLER ****
_main()
e4:
e6: pushab 0x18(pc)
ec: pushl $0x2
# в следующей строке вызывается функция signal
ee: calls $0x2,0x23(pc)
f5: pushl $0x2
f7: clrl -(sp)
# в следующей строке вызывается библиотечная процедура kill
f9: calls $0x2,0x8(pc)
100: ret
101: halt
102: halt
103: halt
_catcher()
104:
106: ret
107: halt
_kill()
108:
# в следующей строке вызывается внутреннее прерывание операционной системы
10a: chmk $0x25
10c: bgequ 0x6 ‹0x114›
10e: jmp 0x14(pc)
114: clrl r0
116: ret
Рисунок 7.10. Результат дисассемблирования программы приема сигналов
Рисунок 7.11. Стек задачи и область сохранения структур ядра до и после получения сигнала
Эту ситуацию можно разобрать на примере программы, представленной на Рисунке 7.12. Процесс обращается к системной функции signal для того, чтобы дать указание принимать сигналы о прерываниях и исполнять по их получении функцию sigcatcher. Затем он порождает новый процесс, запускает системную функцию nice, позволяющую сделать приоритет запуска процесса-родителя ниже приоритета его потомка (см. главу 8), и входит в бесконечный цикл. Порожденный процесс задерживает свое выполнение на 5 секунд, чтобы дать родительскому процессу время исполнить системную функцию nice и снизить свой приоритет. После этого порожденный процесс входит в цикл, в каждой итерации которого он посылает родительскому процессу сигнал о прерывании (посредством обращения к функции kill). Если в результате ошибки, например, из-за того, что родительский процесс больше не существует, kill завершается, то завершается и порожденный процесс. Вся идея состоит в том, что родительскому процессу следует запускать функцию обработки сигнала при каждом получении сигнала о прерывании. Функция обработки сигнала выводит сообщение и снова обращается к функции signal при очередном появлении сигнала о прерывании, родительский же процесс продолжает исполнять циклический набор команд. Однако, возможна и следующая очередность наступления событий: 1. Порожденный процесс посылает родительскому процессу сигнал о прерывании. 2. Родительский процесс принимает сигнал и вызывает функцию обработки сигнала, но резервируется ядром, которое производит переключение контекста до того, как функция signal будет вызвана повторно. 3. Снова запускается порожденный процесс, который посылает родительскому процессу еще один сигнал о прерывании. 4. Родительский процесс получает второй сигнал о прерывании, но перед тем он не успел сделать никаких распоряжений относительно способа обработки сигнала. Когда выполнение родительского процесса будет возобновлено, он завершится.
#include ‹signal.h›
sigcatcher()
{
printf("PID %d принял сигнал\n", getpid()); /* печать PID */
signal(SIGINT, sigcatcher);
}
main()
{
int ppid;
signal(SIGINT, sigcatcher);
if (fork() == 0)
{
/* дать процессам время для выполнения установок */
sleep(5); /* библиотечная функция приостанова на 5 секунд */
ppid = getppid(); /* получить идентификатор родителя */
for (;;)
if (kill(ppid, SIGINT) == -1)
exit();
}
/* чем ниже приоритет, тем выше шансы возникновения конкуренции */
nice(10);
for (;;);
}
Рисунок 7.12. Программа, демонстрирующая возникновение соперничества между процессами в ходе обработки сигналов
В программе описывается именно такое поведение процессов, поскольку вызов родительским процессом функции nice приводит к тому, что ядро будет чаще запускать на выполнение порожденный процесс. По словам Ричи (эти сведения были получены в частной беседе), сигналы были задуманы как события, которые могут быть как фатальными, так и проходящими незаметно, которые не всегда обрабатываются, поэтому в ранних версиях системы конкуренция процессов, связанная с посылкой сигналов, не фиксировалась. Тем не менее, она представляет серьезную проблему в тех программах, где осуществляется прием сигналов. Эта проблема была бы устранена, если бы поле описания сигнала не очищалось по его получении. Однако, такое решение породило бы новую проблему: если поступающий сигнал принимается, а поле очищено, вложенные обращения к функции обработки сигнала могут переполнить стек. С другой стороны, ядро могло бы сбросить значение функции обработки сигнала, тем самым делая распоряжение игнорировать сигналы данного типа до тех пор, пока пользователь вновь не укажет, что нужно делать по получении подобных сигналов. Такое решение предполагает потерю информации, так как процесс не в состоянии узнать, сколько сигналов им было получено. Однако, информации при этом теряется не больше, чем в том случае, когда процесс получает большое количество сигналов одного типа до того, как получает возможность их обработать. В системе BSD, наконец, процесс имеет возможность блокировать получение сигналов и снимать блокировку при новом обращении к системной функции; когда процесс снимает блокировку сигналов, ядро посылает процессу все сигналы, отложенные (повисшие) с момента установки блокировки. Когда процесс получает сигнал, ядро автоматически блокирует получение следующего сигнала до тех пор, пока функция обработки сигнала не закончит работу. В этих действиях ядра наблюдается аналогия с тем, как ядро реагирует на аппаратные прерывания: оно блокирует появление новых прерываний на время обработки предыдущих. Второе несоответствие в обработке сигналов связано с приемом сигналов, поступающих во время исполнения системной функции, когда процесс приостановлен с допускающим прерывания приоритетом. Сигнал побуждает процесс выйти из приостанова (с помощью longjump), вернуться в режим задачи и вызвать функцию обработки сигнала. Когда функция обработки сигнала завершает работу, происходит то, что процесс выходит из системной функции с ошибкой, сообщающей о прерывании ее выполнения. Узнав об ошибке, пользователь запускает системную функцию повторно, однако более удобно было бы, если бы это действие автоматически выполнялось ядром, как в системе BSD. Третье несоответствие проявляется в том случае, когда процесс игнорирует поступивший сигнал. Если сигнал поступает в то время, когда процесс находится в состоянии приостанова с допускающим прерывания приоритетом, процесс возобновляется, но не выполняет longjump. Другими словами, ядро узнает о том, что процесс проигнорировал поступивший сигнал только после возобновления его выполнения. Логичнее было бы оставить процесс в состоянии приостанова. Однако, в момент посылки сигнала к пространству процесса, в котором ядро хранит адрес функции обработки сигнала, может отсутствовать доступ. Эта проблема может быть решена путем запоминания адреса функции обработки сигнала в записи таблицы процессов, обращаясь к которой, ядро получало бы возможность решать вопрос о необходимости возобновления процесса по получении сигнала. С другой стороны, процесс может немедленно вернуться в состояние приостанова (по алгоритму sleep), если обнаружит, что в его возобновлении не было необходимости. Однако, пользовательские процессы не имеют возможности осознавать собственное возобновление, поскольку ядро располагает точку входа в алгоритм sleep внутри цикла с условием продолжения (см. главу 2), переводя процесс вновь в состояние приостанова, если ожидаемое процессом событие в действительности не имело места. Ко всему сказанному выше следует добавить, что ядро обрабатывает сигналы типа «гибель потомка» не так, как другие сигналы. В частности, когда процесс узнает о получении сигнала «гибель потомка», он выключает индикацию сигнала в соответствующем поле записи таблицы процессов и по умолчанию действует так, словно никакого сигнала и не поступало. Назначение сигнала «гибель потомка» состоит в возобновлении выполнения процесса, приостановленного с допускающим прерывания приоритетом. Если процесс принимает такой сигнал, он, как и во всех остальных случаях, запускает функцию обработки сигнала. Действия, предпринимаемые ядром в том случае, когда процесс игнорирует поступивший сигнал этого типа, будут описаны в разделе 7.4. Наконец, когда процесс вызвал функцию signal с параметром «гибель потомка» (death of child), ядро посылает ему соответствующий сигнал, если он имеет потомков, прекративших существование. В разделе 7.4 на этом моменте мы остановимся более подробно.
7.2.2 Группы процессов
Несмотря на то, что в системе UNIX процессы идентифицируются уникальным кодом (PID), системе иногда приходится использовать для идентификации процессов номер «группы», в которую они входят. Например, процессы, имеющие общего предка в лице регистрационного shell'а, взаимосвязаны, и поэтому когда пользователь нажимает клавиши «delete» или «break», или когда терминальная линия «зависает», все эти процессы получают соответствующие сигналы. Ядро использует код группы процессов для идентификации группы взаимосвязанных процессов, которые при наступлении определенных событий должны получать общий сигнал. Код группы запоминается в таблице процессов; процессы из одной группы имеют один и тот же код группы.
Для того, чтобы присвоить коду группы процессов начальное значение, приравняв его коду идентификации процесса, следует воспользоваться системной функцией setpgrp. Синтаксис вызова функции:
grp = setpgrp();
где grp — новый код группы процессов. При выполнении функции fork процесс-потомок наследует код группы своего родителя. Использование функции setpgrp при назначении для процесса операторского терминала имеет важные особенности, на которые стоит обратить внимание (см. раздел 10.3.5).
7.2.3 Посылка сигналов процессами
Для посылки сигналов процессы используют системную функцию kill. Синтаксис вызова функции:
kill(pid, signum)
где в pid указывается адресат посылаемого сигнала (область действия сигнала), а в signum — номер посылаемого сигнала. Связь между значением pid и совокупностью выполняющихся процессов следующая:
• Если pid — положительное целое число, ядро посылает сигнал процессу с идентификатором pid.
• Если значение pid равно 0, сигнал посылается всем процессам, входящим в одну группу с процессом, вызвавшим функцию kill.
• Если значение pid равно -1, сигнал посылается всем процессам, у которых реальный код идентификации пользователя совпадает с тем, под которым исполняется процесс, вызвавший функцию kill (об этих кодах более подробно см. в разделе 7.6). Если процесс, пославший сигнал, исполняется под кодом идентификации суперпользователя, сигнал рассылается всем процессам, кроме процессов с идентификаторами 0 и 1.
• Если pid — отрицательное целое число, но не -1, сигнал посылается всем процессам, входящим в группу с номером, равным абсолютному значению pid.
Во всех случаях, если процесс, пославший сигнал, исполняется под кодом идентификации пользователя, не являющегося суперпользователем, или если коды идентификации пользователя (реальный и исполнительный) у этого процесса не совпадают с соответствующими кодами процесса, принимающего сигнал, kill завершается неудачно.
В программе, приведенной на Рисунке 7.13, главный процесс сбрасывает установленное ранее значение номера группы и порождает 10 новых процессов. При рождении каждый процесс-потомок наследует номер группы процессов своего родителя, однако, процессы, созданные в нечетных итерациях цикла, сбрасывают это значение.
Страницы:
1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37
|
|