 |
|
Популярные авторы:: Азимов Айзек :: Грин Александр :: Борхес Хорхе Луис :: Чехов Антон Павлович :: Лесков Николай Семёнович :: Толстой Лев Николаевич :: Горький Максим :: Лондон Джек :: Кларк Артур Чарльз :: СССР Внутренний Предиктор Популярные книги:: Дюна (Книги 1-3) :: Жут :: Как хорошо быть генералом :: Справочник по реестру Windows XP :: Паштет из гусиной печенки :: Вальсирующие, или Похождения чудаков :: Упущенный шанс Сталина :: Версия Кестлера - книга и жизнь :: Пути будущего :: Perpetuum mobile |
Большая Советская Энциклопедия (АВ)ModernLib.Net / Энциклопедии / БСЭ / Большая Советская Энциклопедия (АВ) - Чтение (стр. 30)
Абстрактный автомат называется конечным, если множества U, X
,Y - конечны. В абстрактно-алгебраической А. т. можно выделить теорию конечных автоматов и теорию бесконечных автоматов. Основные вопросы теории конечных автоматов можно считать решенными. Наиболее интересными результатами теории конечных автоматов являются: теорема анализа и синтеза конечных автоматов, которая даёт характеристику событий, представленных в конечных автоматах, теоремы об определяющих соотношениях в алгебре регулярных событий, оценки длины экспериментов с конечными автоматами, а также ряд результатов по исследованию алгебраических свойств абстрактных автоматов. В теории бесконечных автоматов рассматриваются различные концепции бесконечных автоматов, точнее выделяются классы бесконечных автоматов специального вида. Этот раздел важен тесной связью с общей теорией формальных языков и грамматик (см.
Математическая лингвистика
), а также с теорией алгоритмов (см.
Алгоритмов теория
). В рамках абстрактно-алгебраической А. т. наметился (конец 60-х гг.) подход к решению проблемы создания алгебры алгоритмов и построения аппарата для формальных преобразований выражений в этой алгебре, что позволяет совершенно по-новому подойти к решению такого рода задач, как эквивалентность схем алгоритмов, и даёт возможность эффективно решать оптимизационные задачи в проектировании дискретных устройств.
Другим разделом А. т. является структурная А. т. Здесь автомат представляется в виде сети, элементы которой выбираются из некоторой заданной совокупности элементарных автоматов, соединены между собой некоторым специальным образом и осуществляют запоминание и преобразование элементарных сигналов. Основными результатами структурной А. т. являются: практическая методика построения сложных логических сетей, исследования по асимптотическим оценкам сложности их, решению проблемы полноты системы элементарных автоматов, кодированию состояний автоматов, оптимальной реализации логических сетей в различных элементных структурах и т. д. Структурная А. т. тесно связана с теорией кодирования, общей теорией переключательных функций, теорией комбинационных схем, теорией информации, теорией надёжности дискретных устройств и т. п. Третьим разделом А. т. является теория вероятностных автоматов и самоорганизующихся систем. Основные приложения А. т. имеет в практике проектирования и автоматизации проектирования дискретных устройств и, в частности, вычислительных машин. Она приобретает всё более важное значение для таких классических математических дисциплин, как теория алгоритмов, с одной стороны, и таких современных теорий в математике и кибернетике, как теория формальных систем, теория программирования, теория формальных языков и грамматик - с другой. Лит.:Автоматы. Сб. ст., под ред. Э. Шеннона и Дж. Маккарти, пер. с англ., М., 1956; Глушков В. М, Трахтенброт Б. А, Введение в теорию конечных автоматов, М., 1962; Логика. Автоматы. Алгоритмы, М., 1963; Гилл А., Введение в теорию конечных автоматов, пер. с англ., М. 1966. Ю. В. Капитонова. Автомашинист Автомашини'стжелезнодорожный, автоматическое устройство, помогающее машинисту выполнять график движения с повышенной точностью. Эффективно применяется при малых интервалах между поездами (метрополитен, пригородное железнодорожное сообщение). Система автоматического управления движением поезда впервые создана в Советском Союзе. В 1958 под Москвой были проведены испытания пригородного поезда с А., который обеспечил выполнение графика и точность остановки поезда. Первое упоминание об А. за рубежом относится к 1959, а сообщение об испытаниях первого поезда с А. в нью-йоркском метро появилось в 1960, где А. решал лишь задачу точной остановки поезда, но не контролировал выполнение графика. Первые образцы А. для поездов пригородного сообщения за рубежом появились в 1965 для железнодорожного узла в Сан-Франциско (США). А. действует по программе 1(см. рис. ), отражающей заданный график движения и содержащей граничные условия движения (допустимые скорости V пр, интенсивности разгона и замедления и т. п.). При движении поезда по пути SА. сравнивает действительное время t дс программным t при, с учётом граничных условий, с помощью блока 2меняет режимы Рведения поезда, выбирая момент или точку пути для перехода от одного режима к другому. В упрощённых системах функции автоматики ограничены сравнением времени и скорости движения с программными. Результат сравнения в виде отклонения от графика D tили резерва повышения скорости D Vс помощью табло 3и 4сообщается машинисту, который принимает решение об изменении режима. Блок программы движения поезда может быть расположен на центральном пункте (централизованная система), на пути (распределённая система) или на поезде (автономная система). В первом случае команды об изменении режима движения для каждого поезда вырабатываются в вычислительном центре на основании информации, поступающей от всех поездов, и передаются на нужный поезд, для чего каждый поезд должен иметь свой адрес, присвоенный ему либо участку, по которому он движется, независимо от номера поезда. На поезде сохраняются только исполнительная аппаратура и устройства для передачи информации и приёма команд. Эта система наиболее перспективна, однако требует большого числа каналов двусторонней связи между центральным пунктом и движущимся поездом. При расположении блока программы на пути роль центрального пункта ограничивается передачей единого для всех поездов времени, сигналов, корректирующих движение поезда, и, при наличии более чем одной программы, - сигналов, включающих нужную из программ. Устройства на поезде такие же, как и в первом случае. Такой способ наиболее приемлем для участков с однотипными поездами (метрополитены). Расположение блока программы на локомотиве (поезде) позволяет вести по участку разнотипные поезда. Число каналов связи с центральным пунктом минимальное и может ограничиваться передачей единого времени. Программа выбирается автоматически, дистанционно или машинистом в соответствии с номером нитки графика. Способ наиболее пригоден при постепенном переводе поездов на автоматическое управление. Система А. постоянно связана с другими автоматическими системами, участвующими в процессе управления движением. Она воздействует на локомотивную автоматику 5,выполняющую выбранные ею режимы, и подчиняется командам автодиспетчера 6и автоблокировки 7. Через автодиспетчер А. взаимосвязан с другими автоматическими системами, выполняющими различные функции на железнодорожном транспорте. В перспективе А. будет составной частью комплексной системы автоматического управления участком, дорогой. Лит.:Фаминский Г. В., Устройство и эффективность «автомашиниста», Труды Всесоюзного научно-исследовательского института железнодорожного транспорта, 1967, в. 336; Кекониус О. и Кольберг Н. О., «Автомашинист» для Стокгольмского метрополитена, «Ежемесячный бюл. Международной Ассоциации железнодорожных конгрессов», 1967, № 2. Г. В. Фаминский. 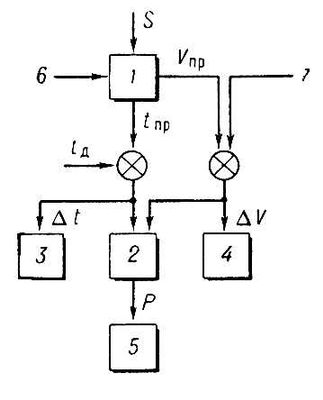
Схема работы автомашиниста. Автометаморфизм Автометаморфи'зм(геол.), изменение магматической горной породы в процессе её отвердевания, происходящее под действием растворов, отделяющихся от породы во время её охлаждения. «Автометрия» «Автометри'я»,научно-технический журнал, орган Сибирского отделения АН СССР. Издаётся в Новосибирске. Основан в 1965. Выходит 6 номеров в год, тираж (1969) 1700 экземпляров. Освещает новые результаты по главным разделам автометрии, измерительным и контрольным автоматически действующим приборам, системам и элементам, их проектированию и контролю качества, использованию; публикует материалы по исследованию и разработке новейших средств получения и обработки измерительной информации. Автометрия Автометри'я(от авто... и ...метрия),научная дисциплина, изучающая теоретические основы проектирования автоматических измерительных и контрольных приборов и измерительных информационных систем (ИИС). По методам исследований А. является ветвью технической кибернетики, ставящей своей целью автоматизацию сбора и обработки измерительной информации. А. анализирует исходные данные об исследуемых объектах и вид выходной количественной информации, обосновывает принципы построения оптимальных в заданном смысле технических средств измерения, контроля и технической диагностики, методы получения и обработки измерительной информации, а также исследует методы рационального планирования измерительного эксперимента и создания ИИС, предназначенных для использования в промышленности, научных исследованиях и т. п. Лит.:Карандеев К. Б., Цапенко М. П., Состояние и проблемы автометрии, «Автометрия», 1967, № 5. М. П. Цапенко. Автомеханические институты Автомехани'ческие институ'ты,см. Машиностроительные и механические институты . Автомиксис Автоми'ксис,аутомиксис (от авто... и греч. mнxis - смешение, совокупление), самооплодотворение, слияние половых клеток ( гамет ), принадлежащих одной и той же особи. А. довольно широко распространён среди простейших, многих грибов и части диатомовых водорослей. Автомобилеразгрузчик Автомобилеразгру'зчик, автомобилеопрокидыватель, устройство для выгрузки сыпучих грузов из кузовов бортовых автомобилей. А. бывают стационарные и передвижные (в т. ч. самоходные), тупиковые и проездные. Стационарные А. обычно применяются на элеваторах (для зерна), самоходные - на зерноочистительных токах, перегрузочных площадках для гравия, щебня и др. По принципу действия различают А. с гидравлической или механической системой подъёма. Для разгрузки автомобиль заезжает на платформу А., оборудованную устройством для наклона на угол, обеспечивающий саморазгрузку. Для фиксации автомобиля во время наклона на платформе имеются выступы или упоры для колёс. Наклон автомобиля производится назад или на боковую сторону. И. И. Батищев. 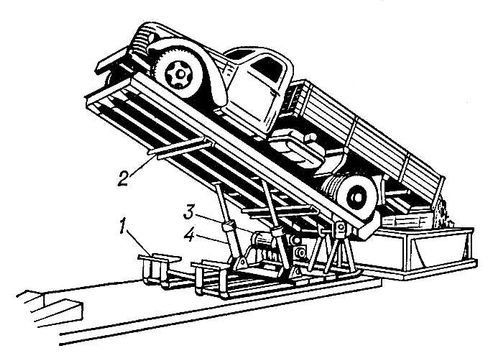
Автомобилеразгрузчик с гидравлической системой подъёма: 1 - опорная рама; 2 - платформа; 3 - гидропривод; 4 - гидравлический цилиндр. Автомобиль Автомоби'ль(от авто... и лат. mobilis - движущийся), средство безрельсового транспорта с собственным двигателем. Историческая справка.Ещё в средние века были известны попытки создания повозок, которые должны были передвигаться силой ветра или мускульной силой сидящих в них людей. Довольно совершенную для своего времени машину (1752) создал русский механик-самоучка крестьянин Леонтий Шамшуренков. Его «самобеглая коляска» приводилась в движение силой двух человек. В 1784-91 над вариантами трёх- и четырехколёсной «самокатки» работал русский изобретатель И. П. Кулибин. В его «самокатке» ( рис. 1 ) были впервые применены такие элементы А., как коробка передач, рулевой механизм, тормоза, роликовые подшипники. С появлением паровой машины (2-я половина 18 в.) создание самодвижущихся повозок быстро продвинулось вперёд. В 1769-70 во Франции Ж. Кюньо ( рис. 2 ), а через несколько лет в Англии У. Мёрдок и Р. Тревитик построили паровые А. Некоторое распространение паровые А. получили в 19 в., например паровые автомобили Г. Герни и У. Ханкока (Англия), А. Болле, А. де Диона и Л. Серполле (Франция). В 30-х гг. 19 в. были попытки установить регулярные пассажирские рейсы паровых А. Много интересных проектов применения паровых А. было в России. Изобретатель и предприниматель В. Гурьев предложил (1837) создать сеть деревянных (торцовых) дорог, по которым могли бы регулярно совершать рейсы паровые А.-тягачи с колёсными прицепами (повозками) летом и санными - зимой. В конце 19 в. производились опыты по созданию электрических А. с питанием от аккумуляторной батареи; они нашли некоторое распространение. Русский инженер И. В. Романов разработал (1899) оригинальную конструкцию электрического извозчика и электробуса ( рис. 3 ). Большое влияние на развитие конструкции А. имели изобретения дифференциала (1828, О. Пеккёр, Франция), пневматической шины (1845, Р. Томпсон, Англия), передних управляемых колёс на цапфах (1816, Г. Лангеншпергер, Германия), независимой подвески колёс (1878, А. Болле, Франция) и др. Широкое применение А. как транспортного средства начинается с появлением быстроходного двигателя внутреннего сгорания . Э. Ленуар (Франция) в 1862 сделал попытку установки на А. своего газового двигателя, которая успеха не имела. В 1885 Г. Даймлер (Германия) построил мотоцикл с бензиновым двигателем, а в 1886 его соотечественник К. Бенц взял патент на трёхколёсный А. с таким же двигателем мощностью 0,75 л. с. Последующие годы явились началом промышленного производства А. В 1890-е гг. появились первые А. «Панар-Левассор» и"Де Дион-Бутон" (Франция), в 1892 построил свой первый автомобиль Генри Форд (США) и начал их промышленное производство в 1903 ( рис. 4 ). Один из первых русских А. «Руссо-Балт» (1908) показан на рис. 5 . Первый советский А. - АМО-Ф15 был выпущен в 1924 ( рис. 6 ). В 1932 в СССР началось массовое производство А. ГАЗ-А ( рис. 7 ). См. Автомобильная промышленность . О развитии конструкций А. см. в статьях Грузовой автомобиль , Легковой автомобиль . С 1894 регулярно устраиваются автомобильные гонки, которые сыграли большую роль в развитии конструкции А. и их распространении. Если в первой гонке средняя скорость была 24 км/ч, то уже через 5 лет она достигла 70 км/ч; в 1904 она составила 100 км/чи в 1907 - 114 км/ч. Абсолютный мировой рекорд скорости составил (1968) 966,753 км/чна А. с газотурбинным и 658,667 км/чс поршневым двигателем. Классификация А.По назначению А. разделяются на транспортные, специальные и гоночные. Транспортные А. служат для перевозки грузов и пассажиров. Специальные А. имеют постоянно смонтированное оборудование или установки и применяются для различных целей (пожарные и коммунальные А., автолавки, автокраны и т. п.). Гоночные А. предназначаются для спортивных соревнований, в том числе для установления рекордов скорости (рекордно-гоночные А.). Транспортные А. в свою очередь делятся на легковые, грузовые и автобусы. Легковые автомобили имеют вместимость от 2 до 8 человек. Они выпускаются с закрытыми (седан и лимузин), открытыми (фаэтон) и открывающимися (кабриолет) кузовами. Грузовые автомобили оборудованы кузовом для перевозки груза, грузоподъёмность их от 0,25 до 100 т. Грузовые А. без кузова или с небольшим кузовом, предназначенным для балласта, приспособленные для буксировки прицепных систем, называются А.-тягачами , они бывают седельные (для полуприцепов) и буксирные (для прицепов). А. или А.-тягач вместе с прицепной системой (прицеп, полуприцеп, прицеп-роспуск, прицеп-тяжеловоз) образуют автомобильный поезд. Автобусы, имеющие кузов вместимостью более 8 чел., подразделяются на городские, пригородные, междугородные (туристские), местного сообщения и др. По проходимости А. разделяются на дорожные, внедорожные (карьерные) и А. повышенной и высокой проходимости. Дорожные предназначены для эксплуатации по общей сети автомобильных дорог. Внедорожные, имеющие увеличенные габаритные размеры и осевые нагрузки, могут использоваться только на специальных дорогах, например в карьерах. А. повышенной и высокой проходимости рассчитаны на работу в тяжёлых дорожных условиях и по бездорожью. Основной вид таких А. - колёсные полноприводные (т. е. имеющие привод ко всем колёсам). Кроме колёсных, различают ещё следующие А. высокой проходимости: колёсно-гусеничные со сменными гусеничными движителями или колёсами; полугусеничные, имеющие одновременно гусеничные движители и колёса; снегоходы с движителями в виде широких гусениц или шнеков; А. на пневмокатках; амфибии - колёсные А. с водонепроницаемым кузовом и дополнительным движителем в виде гребного винта; А. на воздушной подушке, приводимые в движение тяговым воздушным винтом или реакцией направляемой назад струи воздуха от компрессора; шагающие А., передвигающиеся с помощью перемещающихся лыж. Проходимость обычных дорожных А. может быть существенно улучшена установкой на их задние ведущие колёса арочных шин с очень широким профилем и высокими грунтозацепами. Конструкция А.Автомобиль состоит из двигателя, трансмиссии, ходовой части, механизмов управления, электрооборудования, кузова для перевозки пассажиров или грузов и кабины (у грузовых А.). В зависимости от рода двигателя различают: паровые А. (распространения не имеют); бензиновые А. - с двигателем внутреннего сгорания, работающим на автомобильном бензине (большинство легковых А. и грузовых А, малой и средней грузоподъёмности); дизельные А. - с двигателем внутреннего сгорания, работающим на дизельном топливе (преимущественно грузовые А. большой грузоподъёмности и многоместные автобусы); газобаллонные автомобили - с газовым двигателем внутреннего сгорания, работающим на сжатых или сжиженных горючих газах, запас которых находится в установленных на А. баллонах (распространены только в районах с дешёвым газовым топливом); газогенераторные автомобили - с двигателем внутреннего сгорания, работающим на газе, получаемом из твёрдого топлива (древесных чурок, угля, торфа и различных брикетов) в газогенераторе, установленном на А. (получили массовое применение в годы Великой Отечественной войны вследствие дефицита жидких топлив); газотурбинные автомобили - с газовой турбиной (пока распространения не получили, но перспективны для применения в качестве тяжёлых и внедорожных грузовых А. и скоростных междугородных автобусов); электрические А. - с двигателем, работающим от аккумуляторных батарей (из-за малого запаса хода и большого веса пока используются в небольшом количестве, главным образом как грузовые А. малой грузоподъёмности для работы в городах, перспективны как легковые и грузовые А. после промышленного освоения аккумуляторов большой ёмкости при малом весе). См. также Автомобильный двигатель . Трансмиссия (силовая передача) передаёт вращающий момент от двигателя к движителю А. (колёсам, гусеницам и др.). Трансмиссия может быть: механической, электромеханической и гидромеханической. Наиболее распространена механическая трансмиссия ( рис. 8 ), которая обычно состоит из сцепления - муфты, дающей возможность кратковременно разъединить и плавно соединить двигатель и последующие механизмы трансмиссии; коробки передач - шестерённого ступенчатого редуктора, позволяющего изменять в широких пределах вращающий момент на ведущих колёсах (тяговую силу) и осуществлять задний ход; карданной передачи - валов с шарнирами, передающих вращающий момент от коробки передач к главной передаче при изменяющихся углах между их валами; главной передачи - шестерённого редуктора, постоянно повышающего вращающий момент, передаваемый от коробки передач к ведущим колёсам; дифференциала - механизма, распределяющего вращающий момент от главной передачи между ведущими колёсами, благодаря чему они вращаются на поворотах и неровностях дороги с разными угловыми скоростями; полуосей, передающих вращающий момент на ведущие колёса. Главные передачи, выполняемые ранее в виде пары конических шестерён с прямыми зубьями (у грузовых А. в виде двух пар - цилиндрической и конической), делают со спиральными зубьями или с гипоидным зацеплением. При поперечном расположении двигателя главные передачи выполняются в виде цилиндрических передач. На некоторых А. высокой проходимости или большой грузоподъёмности применяют разнесённые главные передачи в виде центрального конического редуктора и бортовых (колёсных) редукторов (пары цилиндрических шестерён с наружным или внутренним зацеплением, планетарного редуктора). Наиболее перспективны бесступенчатые передачи, которые значительно облегчают управление, улучшают комфортабельность езды и проходимость А. Эти передачи часто называют автоматическими трансмиссиями, поскольку в них передаточное число изменяется автоматически с помощью аппаратуры автоматического управления коробкой передач или совместного действия трансформатора момента и аппаратуры автоматического управления. Широко распространены гидромеханические (гидротрансформатор и ступенчатая механическая коробка передач), гидрообъёмные (гидронасос и гидромоторы) и электромеханические (генератор, электродвигатели и механические редукторы) трансмиссии. Гидромеханическую передачу чаще всего применяют для легковых А. высокого класса и больших городских автобусов, электромеханические - для особо тяжёлых грузовых А. См. Гидродинамическая передача . Ходовая часть А. состоит из рамы, подвески, осей (мостов) и колёс. Рама А. служит для установки кузова, кабины, двигателя, коробки передач и других механизмов и узлов. У большинства легковых А. и автобусов раму заменяет кузов, который в этом случае представляет собой прочную и жёсткую несущую систему. Подвеска А. выполняет упругую связь рамы или несущего кузова с осями (мостами). При помощи подвески осуществляется передача сил, действующих на колёса, раме (кузову), смягчаются динамические нагрузки, колебаниям придаётся желаемый характер, что обеспечивает необходимую плавность хода и устойчивость А. при движении. Долгое время на А. применялась подвеска в виде листовых рессор, затем в качестве упругого элемента стали использовать также витые пружины, торсионы, пневматические или гидропневматические элементы. Для быстрого гашения колебаний в систему подвески вводятся амортизаторы (обычно гидравлические рычажные и телескопические), а для уменьшения крена на поворотах - стабилизаторы поперечной устойчивости. Широко распространена независимая подвеска колёс ( рис. 9 ), при которой каждое колесо подвешено к раме отдельно, так что изменение положения одного из них не вызывает перемещения другого. На большинстве А. применяют дисковые колёса, состоящие из прикрепляемого к установленной на оси ступице диска и обода с камерной или бескамерной пневматической шиной (см. Шина автомобильная), а для тяжёлых грузовых А. и больших автобусов - также бездисковые колёса с ободом, крепящимся непосредственно к ступице. Механизмы управления А. включают рулевое управление и тормозную систему. Рулевое управление ( рис. 10 ) служит для изменения направления движения А., что осуществляется поворотом передних колёс вместе с цапфами, на которых они установлены, посредством рулевого механизма (червячная, винтовая, кривошипная или реечная передачи), связанного валом с рулевым колесом (штурвалом) и системой привода с цапфами передних колёс. Для облегчения управления А. в рулевой привод вводятся гидравлические, пневматические или гидропневматические усилители. В СССР и других странах, где принято правостороннее движение, применяют левое рулевое управление, и наоборот. Это улучшает обзорность дороги, что особенно важно при обгоне. Рулевое управление должно обеспечивать хорошую поворотливость А. без бокового скольжения управляемых колёс на повороте при минимальном усилии на рулевом колесе, а также стабилизацию колёс при прямолинейном движении. Лёгкость управления создаётся необходимым передаточным числом рулевого механизма и рулевого привода (силовое передаточное число находится в пределах 100-300), причём передаточное число рулевого механизма часто бывает переменным. Рулевой привод осуществляет одновременный поворот управляемых колёс на различные углы с качением их без бокового скольжения. Стабилизация управляемых колёс, т. е. их способность сохранять положение, занимаемое при прямолинейном движении, и автоматически возвращаться в это положение, когда рулевое колесо будет отпущено, достигается поперечным и продольным наклоном шкворней поворотных цапф колёс. Для повышения маневренности А., особенно повышенной проходимости, делают управляемыми все колёса (2-осные А.) или колёса двух передних осей (4-осные А.). Для этой же цели выполняют поворотными колёса прицепов-роспусков или полуприцепов у автопоездов. Тормозная система служит для замедления движения и полной остановки (рабочий ножной тормоз), а также для удержания А. на месте (стояночный ручной тормоз). Рабочий тормоз действует на все колёса А. На каждом колесе устанавливают барабанный или дисковый тормозной механизм, действие которого осуществляется гидравлическим, пневматическим или пневмогидравлическим приводом. В тормозных механизмах тормозные колодки с фрикционными накладками во время торможения прижимаются к колёсному тормозному барабану или диску. Гидравлический привод ( рис. 11 ), который часто бывает снабжен вакуумным или пневматическим усилителем, применяется на легковых А. и грузовых А. малой грузоподъёмности, на остальных А. устанавливается преимущественно пневматический привод, получающий сжатый воздух от компрессора, приводимого в действие двигателем А. Стояночный тормоз действует обычно только на ведущие колёса (непосредственно или через трансмиссию). Для повышения надёжности тормозов применяют раздельный привод от одной педали на передние и задние колёса или дублированный привод на задние колёса. На больших автобусах и тяжёлых грузовых А. всё больше используют дополнительные тормоза-замедлители , в которых часто тормозной момент создаётся двигателем при перекрытом выпускном трубопроводе и прекращении подачи топлива. Применяются также тормоза-замедлители с независимым от двигателя электрическим или гидравлическим тормозящим устройством, действующим на трансмиссию А. Электрооборудование А. состоит из источников тока (аккумуляторной батареи и установленного на двигателе генератора) и нескольких групп потребителей, оно необходимо для работы системы зажигания и пуска двигателя, а также для приборов наружного и внутреннего освещения, световой и звуковой сигнализации А. Система наружного освещения и сигнализации включает: наружное головное освещение, осуществляемое фарами с ближним и дальним светом (свето-технические параметры фар подбираются так, чтобы обеспечить видимость дороги вперёд на 100-150 мпри движении с большими скоростями и безопасный разъезд на сравнительно узкой дороге без ослепления водителей встречных А.); белые или жёлтые фонари (подфарники), обозначающие спереди габариты А. при его движении в тёмное время суток с выключенными фарами по хорошо освещенным улицам и дорогам; задние (красные) фонари, обозначающие габариты А. сзади; указатели поворотов (фонари с мигающими огнями, установленные спереди и сзади, а иногда и с боковых сторон А.); фонари светового стоп-сигнала для оповещения о торможении. Кроме того, могут устанавливаться противотуманные фары, габаритные фонари и отражатели, а также специальные светящиеся знаки (автопоезд, такси и т. п.). В некоторых странах введены мигающие задние красные фонари для обозначения стоящего на дороге А. Степень совершенства конструкции А. оценивается по компактности конструкции - рациональное использование габаритов и массы, обеспечивающее необходимую грузо- или пассажировместимость А. при минимальных затратах материалов на его изготовление; по динамичности - интенсивность разгона, устойчивость движения на прямой передаче, максимальная скорость, тяга на крюке (для автопоездов); по топливной экономичности - расход топлива на выполненную транспортную работу (грузовые А. и автобусы) или на 1 кмпробега (легковые А.); по проходимости - геометрические параметры шасси и кузова (дорожный просвет, углы свесов, радиусы продольной и поперечной проходимости), тягово-сцепные свойства, удельное давление на грунт; по удобству пользования - степень обеспечения сохранности грузов в пути и лёгкость выполнения погрузочно-разгрузочных работ, комфортабельность перевозок пассажиров (размеры сидений, проходов, высота подножек, ширина дверей, мягкость подвески, отопление, вентиляция и т. п.); по лёгкости управления - размер усилий и количество необходимых для управления действий водителя, манёвренность А., лёгкость пуска двигателя, запас хода и др.; по безопасности движения - устойчивость управляемого движения, надёжность торможения и длина тормозного пути, обзорность дороги, эффективность освещения и сигнализации и др.; по приспособленности к техническому обслуживанию и ремонту - периодичность и трудоёмкость технического обслуживания и ремонта, лёгкость доступа к агрегатам и узлам при их осмотре, регулировке и ремонте; по долговечности и надёжности - сроки службы, межремонтные пробеги, потребность в ремонтных работах, стабильность рабочих процессов, интенсивность отказов, бездефектность и др. Совершенствование конструкции А. предусматривает максимальную автоматизацию управления рабочими процессами агрегатов, механизмов и систем, а также управления движением А. Созданы А., которые могут работать по заданному маршруту без водителя или при минимальном его участии. Большое внимание уделяется при конструировании новых моделей А. повышению общей надёжности и сведению до минимума необходимых операций технического обслуживания. У перспективных моделей отсутствуют узлы, нуждающиеся в регулировке, в систематической добавке масла (применены антифрикционные материалы или долговечная смазка), а жидкие масла (в двигателе, трансмиссии) могут сменяться через длительный период (30 - 50 тыс. км). 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38 |
|||||||