 |
|
Популярные авторы:: Чехов Антон Павлович :: Борхес Хорхе Луис :: Горький Максим :: Толстой Лев Николаевич :: Раззаков Федор :: Грин Александр :: Азимов Айзек :: Лондон Джек :: БСЭ :: Сименон Жорж Популярные книги:: The Boarding House :: Земля смерти :: Справочник по реестру Windows XP :: Пауки :: Тайна похищения генерала Кутепова :: Испытание в Иноземье (Предтечи - 2) :: Есть многое на небе и земле… :: Ночь даров :: Последний аргумент закона :: "Фома Гордеев" |
Сущность технологии СОМ. Библиотека программистаModernLib.Net / Программирование / Бокс Дональд / Сущность технологии СОМ. Библиотека программиста - Чтение (стр. 14)
class CarPlane { LONG m_cRef; CarPlane(void) : m_cRef(0) {} public: // Main IUnknown methods // Главные методы IUnknown STDMETHODIMP QueryInterface(REFIID, void**); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release(void); private: // define nested class that implements ICar // определяем вложенный класс, реализующий ICar struct XCar : public ICar { // get back pointer to main object // получаем обратный указатель на главный объект inline CarPlane* This(); STDMETHODIMP QueryInterface(REFIID, void**); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release(void); STDMETHODIMP GetMaxSpeed(long *pval); STDMETHODIMP Brake(void); }; // define nested class that implements IPlane // определяем вложенный класс, реализующий IPlane struct XPlane : public IPlane { // Get back pointer to main object // получаем обратный указатель на главный объект inline CarPlane* This(); STDMETHODIMP QueryInterface(REFIID, void**); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release(void); STDMETHODIMP GetMaxSpeed(long *pval); STDMETHODIMP TakeOff(void); }; // declare instances of nested classes // объявляем экземпляры вложенных классов XCar m_xCar; XPlane m_xPlane; }; Использование вложенных классов не является обязательным, но оно подчеркивает, что эти подчиненные классы не имеют смысла вне контекста класса CarPlane. Рисунок 4.7 показывает двоичное размещение этого класса и размещения соответствующих vtbl . 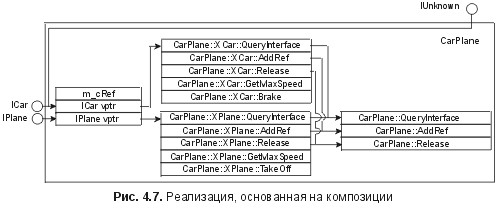 Отметим, что имеется два определения вложенного класса, по одному для каждого реализованного им интерфейса. Это позволяет разработчику объекта обеспечить две различных реализации GetMaxSpeed: STDMETHODIMP CarPlane::XCar::GetMaxSpeed(long *pn) { // set *pn to max speed for cars // устанавливаем *pn для максимальной скорости автомобилей } STDMETHODIMP CarPlane::XPlane::GetMaxSpeed(long *pn) { // set *pn to max speed for planes // устанавливаем *pn для максимальной скорости самолетов } Тот факт, что две реализации GetMaxSpeed встречаются в различных определениях вложенных классов, позволяет определить метод дважды и к тому же гарантирует то, что таблицы vtbl, соответствующие ICar и IPlane, будут иметь различные элементы для GetMaxSpeed. Необходимо также отметить, что хотя класс CarPlane, находящийся на верхнем уровне, реализует методы IUnknown, он не наследует никакому производному от IUnknown классу. Вместо этого объекты CarPlane имеют элементы данных, которые наследуют интерфейсам СОМ. Это значит, что вместо того, чтобы использовать static_cast для вхождения в объект и нахождения определенного указателя vptr, реализация QueryInterface в CarPlane должна возвратить указатель на тот элемент данных, который реализует запрашиваемый интерфейс: STDMETHODIMP CarPlane::QueryInterface(REFIID riid, void **ppv) { if (riid == IID_IUnknown) *ppv = static_cast else if (riid == IID_IVehicle) *ppv = static_cast else if (riid == IID_ICar) *ppv = static_cast else if (riid == IID_IPlane) *ppv = static_cast else return (*ppv = 0), E_NOINTERFACE; ((IUnknown*)(*ppv))->AddRef(); return S_OK; } Для обеспечения идентификации объекта каждый из элементов данных CarPlane должен или воспроизвести этот код в своей собственной реализации QueryInterface, или просто передать управление главной функции QueryInterface в CarPlane. Чтобы осуществить это, необходим механизм перехода к главному объекту со стороны функции-члена составного элемента данных. Определение класса CarPlane::XCar содержит встроенную подпрограмму, которая использует фиксированные смещения для вычисления указателя this главного объекта от указателя this составного элемента данных. inline CarPlane CarPlane::XCar::This(void) { return (CarPlane*)((char*)this // ptr to composite – указатель на композит – offsetof (CarPlane, m_xCar)); } inline CarPlane CarPlane::XPlane::This(void) { return (CarPlane*)((char*)this // ptr to composite – указатель на композит – offsetof(CarPlane, m_xPlane)); } Такая технология вычисления обратного указателя (back-pointer) компактна и чрезвычайно эффективна, так как не требует явных элементов данных для нахождения главного объекта внутри реализации метода элемента данных. При наличии таких алгоритмов вычисления обратного указателя реализация композитного QueryInterface становится тривиальной: STDMETHODIMP CarPlane::XCar::QueryInterface(REFIID r, void**p) { return This()->QueryInterface(r, p); } STDMETHODIMP CarPlane::XPlane::QueryInterface(REFIID r, void**p) { return This()->QueryInterface(r, p); } Такая же передача this потребуется для AddRef и Release для получения обобщенного представления о времени жизни объекта в случае составных (композитных) элементов данных. Технология, основанная на использовании композиции для реализации интерфейсов, требует значительно больше кода, чем при простом множественном наследовании. Кроме того, качество генерированного кода, вероятно, не лучше (а возможно, и хуже), чем в случае множественного наследования. Из того факта, что классу CarPlane не понадобилось наследовать ни одному интерфейсу СОМ, следует, что композиция является разумной технологией для внесения СОМ в старые библиотеки классов. Например, MFC (Microsoft Foundation Classes – библиотека базовых классов Microsoft) использует эту технологию. Причиной применения композиции при реализации новых классов является получение отдельных реализации метода, определенного одинаково более чем в одном интерфейсе. К счастью, стандартные интерфейсы, определяемые СОМ, очень редко создают такие конфликты, а те немногие, которые создают, почти всегда преобразуются в семантически эквивалентные функции. Для разрешения коллизий, подобных тем, что произошли в сценарии с GetMaxSpeed , композиция, вероятно, и не требуется, так как в первом приближении для преобразования двойников в уникальные объекты достаточно использования промежуточных классов. Эта методика проста, эффективна и фактически не требует дополнительного кода. Основная причина использования композиции в новом коде заключается в том, что нужно обеспечить подсчет ссылок в каждом интерфейсе. Иногда желательно разместить ресурсы в объекте на базе уже использующихся интерфейсов. В то же время из использования множественного наследования для реализации интерфейсов СОМ следует, что в каждой таблице vtbl будет использована только одна реализация AddRef и Release. Хотя можно выявить первый запрос на заданный интерфейс и разместить ресурсы по требованию: STDMETHODIMP QueryInterface(REFIID riid, void **ppv) { if (riid == IID_IBoat) { // allocate resource the first time through // размещаем ресурсы при первом проходе if (m_pTonsOfMemory == 0) m_pTonsOfMemory = new char[4096 * 4096]; *ppv = static_cast } else if … } не существует способа определить момент, когда больше нет внешних указателей интерфейса IBoat, так как вызов Release, который клиент делает через интерфейс IBoat, неотличим от вызова Release, сделанного через любой другой интерфейс объекта. В обычной ситуации именно это и нужно, но в данном случае вызовы AddRef и Release через интерфейсы IBoat необходимо рассматривать иначе. Если бы интерфейс IBoat был реализован с использованием композиции, то он имел бы свои собственные уникальные реализации AddRef и Release, в которых он мог бы поддерживать свой собственный счетчик ссылок, отличный от счетчика главного объекта: class CarBoatPlane : public ICar, public IPlane { LONG m_cRef; char *m_pTonsOfMemory; CarBoatPlane (void) : m_cRef(0), m_pTonsOfMemory (0) {} public: // IUnknown methods – методы IUnknown STDMETHODIMP QueryInterface(REFIID, void**); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release(void); // IVehicle methods – методы IVehicle STDMETHODIMP GetMaxSpeed(long *pMax); // ICar methods – методы ICar STDMETHODIMP Brake(void); // IPlane methods – методы IPlane STDMETHODIMP TakeOff(void); // define nested class that implements IBoat // определяем вложенный класс, реализующий IBoat struct XBoat : public IBoat { // get back pointer to main object // получаем обратный указатель на главный объект inline CarBoatPlane* This(); LONG m_cBoatRef; // per-interface ref count // счетчик ссылок на каждый интерфейс XBoat(void) : m_cBoatRef(0) {} STDMETHODIMP QueryInterface(REFIID, void**); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release(void); STDMETHODIMP GetMaxSpeed(long *pval); STDMETHODIMP Sink(void); }; XBoat m_xBoat; }; Реализация AddRef и Release из IBoat могут теперь следить за числом ссылок типа IBoat и высвободить ресурсы, когда они больше не нужны: STDMETHODIMP_(ULONG) CarBoatPlane::XBoat::AddRef() { ULONG res = InterlockedIncrement(&m_cBoatRef); if (res == 1) { // first AddRef – первый AddRef // allocate resource and forward AddRef to object // размещаем ресурсы и пересылаем AddRef на объект This()->m_pTonsOfMemory = new char[4096*4096]; This()->AddRef(); } return res; } STDMETHODIMP_(ULONG) CarBoatPlane::XBoat::Release() { ULONG res = InterlockedDecrement(&m_cBoatRef); if (res == 0) { // last Release – последний Release // free resource and forward Release to object // освобождаем ресурсы и пересылаем Release на объект delete [] This()->m_pTonsOfMemory; This()->Release(); } return res; } Чтобы эта методика работала, все пользующиеся интерфейсными указателями должны придерживаться требований спецификации СОМ: функция Release должна вызываться через указатель, посредством которого вызывается соответствующая функция AddRef. Поэтому правильной концовкой QueryInterface будет следующая: ((IUnknown*)(*ppv))->AddRef(); // use exact ptr // используем точный указатель return S_OK; вместо такого: AddRef(); // just call this->AddRef // только вызов this->AddRef return S_OK; Первый вариант гарантирует, что если клиент пишет следующий правильный код IBoat *pBoat = 0; HRESULT hr = pUnk->QueryInterface(IID_IBoat, (void**)&pBoat); if (SUCCEEDED(hr)) { hr = pBoat->Sink(); pBoat->Release(); } то для AddRef и для Release обязательно будет использовано одно и то же значение указателя. Можно осуществлять композицию в контексте управляемой таблицами реализации QueryInterface. При наличии семейства макросов препроцессора, показанного в предыдущей главе, достаточно всего одного дополнительного макроса, чтобы определить, что вместо базового класса используется элемент данных, и второго макроса, чтобы реализовать методы IUnknown в композите: class CarBoatPlane : public ICar, public IPlane { public: struct XBoat : public IBoat { // composite QI/AddRef/Release/This() // композит из QI/AddRef/Release/This() IMPLEMENT_COMPOSITE_UNKNOWN(CarBoatPlane, XBoat, m_xBoat) STDMETHODIMP GetMaxSpeed(long *pval); STDMETHODIMP Sink(void); }; XBoat m_xBoat; // IVehicle methods // методы IVehicle STDMETHODIMP GetMaxSpeed(long *pMax); // ICar methods // методы ICar STDMETHODIMP Brake(void); // IPlane methods // методы IPlane STDMETHODIMP TakeOff(void); // standard heap-based QI/AddRef/Release // стандартные расположенные в «куче» QI/AddRef/Release IMPLEMENT_UNKNOWN(CarBoatPlane) BEGIN_INTERFACE_TABLE(CarBoatPlane) IMPLEMENTS_INTERFACE_AS(IVehicle, ICar) IMPLEMENTS_INTERFACE(ICar) IMPLEMENTS_INTERFACE(IPlane) // macro that calculates offset of data member // макрос, вычисляющий смещение элемента данных IMPLEMENTS_INTERFACE_WITH_COMPOSITE(IBoat, XBoat, m_xBoat) END_INTERFACE_TABLE() }; В приведенном выше определении класса опущены только определения методов объекта вне QueryInterfасе, AddRef и Release. Два новых макроса, использованных в определении класса, определяются следующим образом: // inttable.h // (book-specific header file) // (заголовочный файл, специфический для данной книги) #define COMPOSITE_OFFSET(ClassName, BaseName, \ MemberType, MemberName) \ (DWORD(static_cast reinterpret_cast offsetof(ClassName, MemberName)))) – 0х10000000) #define IMPLEMENTS_INTERFACE_WITH_COMPOSITE(Req,\ MemberType, MemberName) \ { &IID_##Req,ENTRY_IS_OFFSET, COMPOSITE_OFFSET(_IT,\ Req, MemberType, MemberName) }, // impunk.h // (book-specific header file) // (заголовочный файл, специфический для данной книги) #define IMPLEMENT_COMPOSITE_UNKNOWN(OuterClassName,\ InnerClassName, DataMemberName) \ OuterClassName *This() \ { return (OuterClassName*)((char*)this – \ offsetof(OuterClassName, DataMemberName)); }\ STDMETHODIMP QueryInterface(REFIID riid, void **ppv)\ { return This()->QueryInterface(riid, ppv); }\ STDMETHODIMP_(ULONG) AddRef(void) \ { return This()->AddRef(); }\ STDMETHODIMP_(ULONG) Release(void) \ { return This()->Release(); } Эти макросы препроцессора просто дублируют фактические реализации QueryInterface, AddRef и Release , использованные в композиции. Динамическая композиция Если для реализации интерфейса в классе C++ используется множественное наследование или композиция, то в каждом объекте этого класса будут содержаться служебные данные (overhead) указателя vptr размером в четыре байта на каждый поддерживаемый интерфейс (принимая, что sizeof (void*) == 4). Если число интерфейсов, экспортируемых объектом, невелико, то эти служебные данные не играют важной роли, особенно в свете преимуществ, предоставляемых программной моделью СОМ. Если, однако, число поддерживаемых интерфейсов велико, то размер служебных данных vptr может вырасти до такой степени, что часть объекта, не связанная с СОМ, будет казаться маленькой по сравнению с ними. При использовании каждого из этих интерфейсов все время без служебных данных не обойтись. Если же, однако, эти интерфейсы не будут использоваться никогда или использоваться в течение короткого времени, то можно воспользоваться лазейкой в Спецификации СОМ и оптимизировать vptr некоторых неиспользуемых объектов. Вспомним правило, гласящее, что все запросы QueryInterface на объект относительно IUnknown должны возвращать точно такое же значение указателя. Именно так в СОМ обеспечивается идентификация объектов. В то же время Спецификация СОМ определенно разрешает возвращать другие значения указателей в ответ на запросы QueryInterface относительно любых других типов интерфейсов, кроме IUnknown. Это означает, что для нечасто используемых интерфейсов объект может динамически выделять память для vptr по требованию, не заботясь о возврате того же самого динамически выделенного блока памяти каждый раз, когда запрашивается какой-либо интерфейс. Эта технология временного (transient) размещения композитов впервые была описана в «белой книге» Microsoft Поваренная книга для программистов СОМ (Microsoft white paper The СОМ Programmer's Cookbook), написанной Криспином Госвеллом (Crispin Goswell) (http://www.microsoft.com/oledev). В этой «белой книге» такие временные интерфейсы называются отделяемыми (tearoff). Реализация отделяемого интерфейса подобна реализации интерфейса с использованием композиции. Для отделяемого интерфейса должен быть определен второй класс, наследующий тому интерфейсу, который он будет реализовывать. Чтобы обеспечить идентификацию, QueryInterface отделяемого интерфейса должен делегировать управление функции QueryInterface основного класса. Два основных различия заключаются в том, что: 1) главный объект динамически размещает отделяемый интерфейс вместо того, чтобы иметь элемент данных экземпляра, и 2) отделяемый композит должен содержать явный обратный указатель на главный объект, так как технология фиксированного смещения, используемая в композиции, здесь не работает, поскольку отделяемый интерфейс изолирован от основного объекта. Следующий класс реализует IBoat как отделяемый интерфейс: class CarBoat : public ICar { LONG m_cRef; CarBoat (void): m_cRef(0) {} public: // IUnknown methods // методы IUnknown STDMETHODIMP QueryInterface(REFIID, void**); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release(void); // IVehicle methods // методы IVehicle STDMETHODIMP GetMaxSpeed(long *pMax); // ICar methods // методы ICar STDMETHODIMP Brake(void); // define nested class that implements IBoat // определяем вложенный класс, реализующий IBoat struct XBoat : public IBoat { LONG m_cBoatRef; // back pointer to main object is explicit member // обратный указатель на главный объект – явный член CarBoat *m_pThis; inline CarBoat* This() { return m_pThis; } XBoat(CarBoat *pThis); ~XBoat(void); STDMETHODIMP QueryInterface(REFIID, void**); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release(void); STDMETHODIMP GetMaxSpeed(long *pval); STDMETHODIMP Sink(void); }; // note: no data member of type Xboat // заметим: нет элементов данных типа Xboat }; Для QueryInterface главного объекта необходимо динамически разместить новый отделяемый интерфейс – каждый раз, когда запрашивается IBoat: STDMETHODIMP CarBoat::QueryInterface(REFIID riid, void **ppv) { if (riid == IID_IBoat) *ppv = static_cast else if (riid == IID_IUnknown) *ppv = static_cast : : : Каждый раз при получении запроса на интерфейс IBoat размещается новый отделяемый интерфейс. Согласно стандартной практике QueryInterface вызова AddRef посредством результирующего указателя: ((IUnknown*)*ppv)->AddRef(); AddRef будет обрабатывать непосредственно из QueryInterface только отделяемый интерфейс. Важно то, что главный объект остается в памяти столько времени, сколько существует отделяемый интерфейс. Простейший путь обеспечить это – заставить сам отделяемый интерфейс представлять неосвобожденную ссылку. Это можно реализовать в разработчике и деструкторе отделяемого интерфейса: CarBoat::XBoat::XBoat(CarBoat *pThis) : m_cBoatRef(0), m_pThis(pThis) { m_pThis->AddRef(); } CarBoat::XBoat::~XBoat(void) { m_pThis->Release(); } Как и в случае с композицией, методу QueryInterface отделяемого интерфейса требуется идентифицировать объект, делегируя освобождение функции главного объекта. Однако отделяемый интерфейс может выявлять запросы на тот интерфейс (интерфейсы), который он сам реализует, и просто возвращать указатель, обработанный AddRef, себе самому: STDMETHODIMP CarBoat::XBoat::QueryInterface(REFIID riid, void**ppv) { if (riid != IID_IBoat) return This()->QueryInterface(riid, ppv); *ppv = static_cast reinterpret_cast return S_OK; } Ввиду того, что отделяемый интерфейс должен самоуничтожаться, когда он больше не нужен, он должен поддерживать свой собственный счетчик ссылок и уничтожать себя, когда этот счетчик достигнет нуля. Как отмечалось ранее, деструктор отделяемого интерфейса освободит главный объект до того, как сам исчезнет из памяти: STDMETHODIMP_(ULONG) CarBoat::XBoat::AddRef (void) { return InterlockedIncrement(&m_cRef); } STDMETHODIMP_(ULONG) CarBoat::XBoat::Release(void) { ULONG res = InterlockedDecrement(&m_cBoatRef); if (res == 0) delete this; // dtor releases main object // деструктор освобождает главный объект return res; } Как и в случае с композицией, метод This() можно использовать в любых методах отделяемого интерфейса, которым требуется получить статус главного объекта. Разница состоит в том, что отделяемым интерфейсам требуется явный обратный указатель, в то время как нормальные композиты могут использовать фиксированные смещения, выделяя по четыре байта на композит. На первый взгляд, отделяемые интерфейсы кажутся лучшей из всех возможностей. Когда интерфейс не используется, то на его служебные данные отводится нуль байт объекта. Когда же интерфейс используется, объект косвенно тратит 4 байта на служебные данные отделяемого интерфейса. Подобное впечатление базируется на нескольких обманчивых предположениях. Во-первых, затраты на работающий отделяемый интерфейс составляют отнюдь не только 4 байта памяти для его vptr. Отделяемому интерфейсу требуются также обратный указатель и счетчик ссылок[1]. Во-вторых, несмотря на возможность использования специального распределителя памяти (custom memory allocator ), отделяемому интерфейсу потребуется по крайней мере 4 дополнительных байта на выравнивание и/или заполнение заголовков динамически выделенной памяти, используемых С-библиотекой для реализации malloc/operator new . Это означает, что объект действительно экономит 4 байта, когда интерфейс не используется. Но когда интерфейс используется, отделяемый интерфейс тратит как минимум 12 байт, если подключен специальный распределитель памяти, и 16 байт, если, по умолчанию, подключен оператор new. Если интерфейс запрашивается редко, то такая оптимизация имеет смысл, особенно если клиент освобождает этот интерфейс вскоре после получения. Если же клиент хранит отделяемый интерфейс в течение всего времени жизни объекта, то преимущества отделяемого интерфейса теряются. К сожалению, дело с отделяемым интерфейсом обстоит еще хуже. Как видно из показанной ранее реализации, если объект получает два запроса QueryInterface на тот же самый отделяемый интерфейс, то будут созданы две копии этого отделяемого интерфейса, так как указатель на первый из них полностью забывается главным объектом, поскольку он был возвращен вызывающему объекту. Это означает, что в этом случае отделяемый интерфейс занимает по крайней мере от 24 до 32 байт, так как в памяти находятся оба vptr отделяемого интерфейса, по одному на каждый запрос QueryInterface. Эта память не будет восстановлена, пока клиент не освободит каждый отделяемый интерфейс. Ситуация, когда два запроса QueryInterface удерживают указатель в течение всего времени жизни объекта, особенно важна, так как именно это и происходит при удаленном обращении к объекту. СОМ-слой, реализующий удаленные вызовы, будет дважды запрашивать объект (с помощью QueryInterface) на предмет одного и того же интерфейса и будет удерживать оба результата в течение всего времени жизни объекта. Это обстоятельство делает отделяемые интерфейсы особенно рискованными для объектов, к которым может осуществляться удаленный доступ. Узнав обо всех подводных камнях отделяемых интерфейсов, задаешь себе логичный вопрос: "В каких же случаях отделяемые интерфейсы являются подходящими?" Не существует безусловного ответа; в то же время отделяемые интерфейсы очень хороши для поддержки большого числа взаимно исключающих интерфейсов. Рассмотрим случай, в котором в дополнение к трем транспортным интерфейсам, показанным ранее, имеются интерфейсы ITruck (грузовик), IMonsterТruck (грузовик-монстр), IMotorcycle (мотоцикл), IBicycle (велосипед), IUnicycle (уницикл), ISkateboard (скейтборд) и IHelicopter (вертолет), причем все они наследуют IVehicle. Если бы производящий транспортный класс хотел поддерживать любой из этих интерфейсов, но только по одному из них для каждого заданного экземпляра, то для осуществления этого отделяемые интерфейсы были бы прекрасным способом при условии, что главный объект кэшировал бы указатель на первый отделяемый интерфейс. Определение класса главного объекта выглядело бы примерно так: class GenericVehicle : public IUnknown { LONG m_cRef; IVehicle *m_pTearOff; // cached ptr to tearoff // кэшированный указатель на отделяемый интерфейс GenericVehicle(void) : m_cRef(0), m_pTearOff(0) {} // IUnknown methods // методы IUnknown STDMETHODIMP QueryInterface(REFIID, void **); STDMETHODIMP_(ULONG) AddRef(void); STDMETHODIMP_(ULONG) Release (void); // define tearoff classes // определяем классы отделяемых интерфейсов class XTruck : public ITruck { … }; class XMonsterTruck : public IMonsterTruck { … }; class XBicycle : public IBicycle { … }; : : : }; В этом классе в случае, когда не используется ни один из интерфейсов, объект платит за пустой кэшированный указатель только четырьмя дополнительными байтами. Когда приходит запрос QueryInterfасе на один из десяти транспортных интерфейсов, то память выделена для нового отделяемого интерфейса один раз и кэширована для более позднего использования: STDMETHODIMP GenericVehicle::QueryInterface(REFIID riid ,void **ppv) { if (riid == IID_IUnknown) *ppv = static_cast else if (riid == IID_ITruck) { if (m_pTearOff == 0) // no tearoff yet, make one // отделяемого интерфейса еще нет, создаем один m_pTearOff = new XTruck(this); if (m_pTearOff) // tearoff exists, let tearoff QI // отделяемый интерфейс существует, пусть это QI return m_pTearOff->QueryInterface(riid, ppv); else // memory allocation failure // ошибка выделения памяти return (*ppv = 0), E_NOINTERFACE; } else if (riid == IID_IMonsterTruck) { if (in_pTearOff == 0) // no tearoff yet, make one // отделяемого интерфейса еще нет, создаем один m_pTearOff = new XMonsterTruck(this); if (m_pTearOff) // tearoff exists, let tearoff QI // отделяемый интерфейс существует, пусть это QI return m_pTearOff->QueryInterface(riid, ppv); else // memory allocation failure // ошибка выделения памяти return (*ppv = 0), E_NOINTERFACE; } else … : : : } На основе показанной здесь реализации QueryInterface на каждый объект будет приходиться по большей части по одному отделяемому интерфейсу. Это значит, что в случае отсутствия запросов на транспортные интерфейсы объект будет тратить в сумме 12 байт (vptr IUnknown + счетчик ссылок + кэшированный указатель на отделяемый интерфейс). Если транспортный интерфейс запрошен, то объект будет тратить в сумме от 24 до 28 байт (исходные 12 байт + наследующий Vehicle vptr + счетчик ссылок + обратный указатель на главный объект + (необязательно) служебная запись malloc (memory allocation – выделение памяти)). Если бы в данном случае отделяемые интерфейсы не использовались, то определение класса выглядело бы примерно так: class GenericVehicle : public ITruck, public IHelicopter, public IBoat, public ICar, public IMonsterTruck, public IBicycle, public IMotorcycle, public ICar, public IPlane, public ISkateboard { LONG m_cRef; 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33 |
|||||||