 |
|
Популярные авторы:: Борхес Хорхе Луис :: Азимов Айзек :: Грин Александр :: Лондон Джек :: Горький Максим :: Чехов Антон Павлович :: Лем Станислав :: Раззаков Федор :: Картленд Барбара :: Толстой Лев Николаевич Популярные книги:: Справочник по реестру Windows XP :: Дюна (Книги 1-3) :: Ученик чародея :: Солли :: Другой :: Аригато :: Зеркальное отражение :: Тени Чернобыля :: Анна Каренина :: Трое за Ларцом |
Пилотируемые полеты на ЛунуModernLib.Net / Технические науки / Шунейко Иван Иванович / Пилотируемые полеты на Луну - Чтение (стр. 7)
На пассивном участке траектории полета в алгоритме оценки вырабатываются как угол, так и угловая скорость. При этом применяется нелинейная пороговая логика для подавления шумов измерения низкого уровня. Информация об угловом ускорении при включении ЖРД РСУ также вводится в алгоритм оценки. Управляющие импульсы формируются с помощью законов управления на основе информации об ошибке ориентации, эффективности управления и логических функций на фазовой плоскости. В блоке логики выбора ЖРД РСУ, осуществляется выбор включения ЖРД, в которых сочетается создание требуемых моментов с необходимым направлением поступательного перемещения. Кроме того, в системе имеется временная логика включения ЖРД РСУ для определения условий управления относительно осей U, V двумя ЖРД РСУ, а относительно оси Р четырьмя ЖРД.
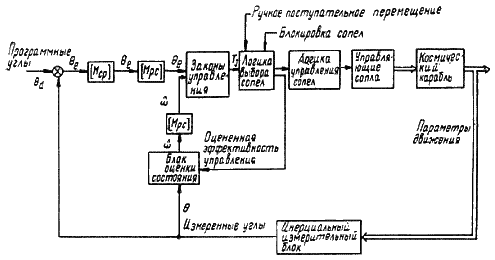 Рис. 24.2. Блок-схема управления стабилизацией. На рис. 24.3 изображена блок-схема автоматического управления ориентацией аппарата на пассивных участках траектории полета. Автоматическое управление ориентацией осуществляется при помощи тех же логических операций, что и стабилизация ориентации, но с добавлением программы изменения ориентации. Эта программа вычисляет требуемые управляющие команды по углу и угловой скорости и ряд углов запаздывания ?. Углы запаздывания вводятся для предотвращения перерегулирования в начале и в конце маневра. Упрощенные уравнения программы маневра изменения ориентации имеют вид:  где уравнение (24.1) решается с периодом цикла управления траекторией полета (?Тc=Nj—Nj-1=2 сек), а уравнение (24.2)—с периодом цикла управления ориентацией (T=0,1 сек). Величина ?d задается угловой скоростью маневра, а величина ?j определяется как предполагаемое угловое ускорение от двух ЖРД РСУ. По окончании маневра величины ?d, ??d и ? обнуляются и система возвращается к режиму стабилизации вновь заданной ориентации. 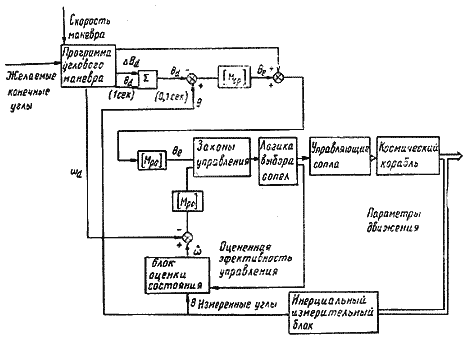 Рис. 24.3. Блок-схема автоматического управления ориентацией лунного корабля на пассивных участках траектории полета. Автоматическое управление аппаратом на активных участках траектории полета значительно сложнее, чем на пассивных. На активных участках к программе ЦАП управления ориентацией добавляются программа управления траекторией полета, программа вычисления массы корабля, в алгоритме оценки определяется угловое ускорение а; законы управления ЖРД РСУ видоизменяются таким образом, чтобы по оцененному значению углового ускорения ввести поправку в текущее значение эффективности управления; на участках снижения и посадки на Луну осуществляется управление величиной и направлением вектора тяги посадочного ЖРД, с учетом взаимодействия с ЖРД РСУ. Масса корабля и тяга ЖРД рассчитываются ЦАП каждые 2 сек по уравнениям  Эти расчеты вводятся в цепь настройки ЦАП. Эффективность управления ЖРД РСУ относительно осей Р, Q, R рассчитывается по уравнению  где аj – угловое ускорение корабля; С1, С2, С3 – константы пропорциональные оставшейся массе. Выбор констант С1, С2, С3 осуществляется для каждой оси и каждой конфигурации аппарата – посадочной и взлетной. Таким образом подсчитанные величины ортогональных компонентов угловых ускорений ?qu и ?ru затем пересчитываются относительно оси V' для определения ?u'u. Вследствие инерциальной симметрии значения ?u'u можно использовать и для расчетов относительно оси V. Эффективность сигнала управления вектором тяги посадочного ЖРД рассчитывается по уравнению  где ?q, ?r– изменение углового ускорения вследствие поворота тяги относительно осей Q и R; F– рассчитываются по уравнению (24.5); Iq и Ir – величины, обратно пропорциональные ?qu и ?ru; L – определяется по уравнению  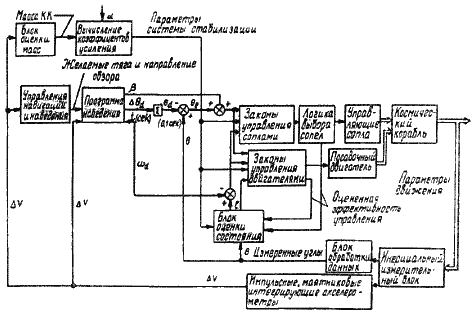 Рис. 24.4. Блок-схема автоматического управления лунным кораблем на активных участках полета при посадке на Луну На рис. 24.4 изображена блок-схема автоматического управления аппаратом на активных участках траектории полета при посадке на Луну. Структура алгоритма расчета ориентации была выбрана на основе калмановской теории фильтрации. Принцип работы алгоритма состоит в сравнении экстраполированных и измеренных значений угла. Для расчета ориентации аппарата необходимыми ЦАП исходными измерениями являются углы кардана инерциальной стабилизированной платформы, которые выдаются каждые 0,1 сек. Чтобы выделить любые смещения углового ускорения, являющиеся следствием тяги посадочного ЖРД от углового ускорения, создаваемого ЖРД РСУ, в блок расчета ориентации необходимо ввести дополнительную информацию. Вводя информацию о работе ЖРД РСУ и информацию об управлении вектором тяги посадочного ЖРД, можно осуществить фильтрацию основных сигналов управления ориентацией, не прибегая к сложным цепям расчета угловой скорости и смещения углового ускорения. Изменения угловых скоростей аппарата от действия ЖРД РСУ на интервале последнего управления рассчитываются по формулам  Смещение углового ускорения, происходящее вследствие команд на отклонение вектора тяги на интервале последнего управления, подсчитывается по уравнению  где T=0,1 сек период квантования; uq, ur – (+ 1,0—1) командные сигналы на поворот вектора тяги относительно осей Q и R. Углы кардана инерциальной стабилизированной платформы, полученные в процессе предыдущего выполнения расчетов, хранятся в блоке памяти бортовой ЭЦВМ. Измерив углы кардана в данный момент, можно рассчитать изменение углов и перевести в изменение углов аппарата. Разность между измеренным изменением ориентации и предсказанным изменением называется «необъяснимым» изменением ориентации. «Необъяснимое» изменение вычисляется и прибавляется к суммарному предыдущему «необъяснимому» изменению, образуя «необъяснимое» изменение ориентации в данный момент  где ?p, ?q, ?r – компоненты «необъяснимого» изменения ориентации по осям Р, Q, R. Выражения в скобках в правой части уравнений (24.11) можно определить как компоненты предсказанного изменения ориентации. Заметим, что предсказанное изменение ориентации исключается вследствие команд на привод кардана ЖРД и точное выражение для изменения ориентации в результате работы ЖРД РСУ аппроксимируется более простым выражением. «Необъяснимое» изменение ориентации используется для уточнения расчетов угловой скорости и углового ускорения аппарата. Но вначале логика используется, чтобы исключить измеренный квантованный шум. Вследствие того, что вероятное распределение этого шума не гауссовское, а прямоугольное, в каждой из осей (Р, Q, R) блока расчета ориентации шум может быть исключен нелинейным логическим фильтром. Для каждой из осей Р, Q, R, если компонент «необъяснимого» изменения ориентации меньше, чем пороговая величина ?max=0,14 град, в этом случае коррекции смещения? ?? и ?? для расчетов угловой скорости и углового ускорения считаются нулевыми. «Необъяснимое» изменение ориентации не обнуляется и когда «необъяснимое» изменение ориентации превышает пороговую величину, вводится коррекция. Нулевые коррекции ?? и ?? рассчитываются по уравнениям  После введения коррекции «необъяснимое» изменение ориентации для этой оси вновь устанавливается равным нулю. Расчет угловой скорости и смещения углового ускорения теперь производятся по уравнениям 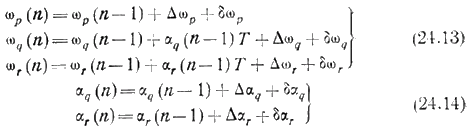 Заметим, что смещение углового ускорения вокруг оси Р принимается равным нулю и на последнем интервале управления не учитывается изменение угловой скорости вследствие отклонения кардана ЖРД. На пассивных участках траектории полета аппарата считается, что компоненты смещения углового ускорения по осям Q и R равны нулю. Динамические характеристики блока расчета ориентации сильно зависят от выбора коэффициентов усиления цепей фильтра К? и К?. Выбор этих коэффициентов основывается на компромиссе между быстротой расчета и исключением колебаний из-за плескания топлива. Учитываемые алгоритмом расчета ориентации динамические эффекты: плескание топлива, изгибные колебания, силовое взаимодействие выхлопных струй ЖРД РСУ с конструкцией корабля, запаздывание тяги ЖРД РСУ по отношению к командам, эксцентриситет тяги ЖРД РСУ, ускорение выхлопных струй ЖРД РСУ при перемещениях по У и Z, не обнаруженные неисправности ЖРД РСУ, запаздывание сервомотора кардана ЖРД, разброс моментов инерции, упругие деформации сервопривода, точность модели измерения количества топлива в баках. Быстрейшая скорость повторения расчетов для ЦАП, возможная в пределах расчетной нагрузки бортовой ЭЦВМ лунного корабля, составляет 10 цикл/сек. Однако для легкой взлетной ступени 2 ЖРД РСУ могут создать угловое ускорение 50 град/сек?. Простейшим законом управления мог бы быть циклический закон, ЖРД РСУ включено – выключено. Но в этом случае точность управления угловой скоростью взлетной ступени была бы только 5 град/сек. Для осуществления управления с необходимой точностью с помощью фактора эффективности управления точно определяется продолжительность включения ЖРД РСУ, потребная для необходимого изменения угловой скорости. Порядок расчета времени работы ЖРД РСУ для случая автоматического управления одним лунным кораблем, запрограммирован для одной оси как функция: 1) ошибки ориентации ?е и ошибки угловой скорости ?е 2) параметров, рассчитываемых в цепи настройки, которые определяют кривизну и положение парабол фазовой плоскости; 3) оценки выгоды получения с одного или двух ЖРД требуемого импульса момента. Обращаясь к этой программе и вводя на входе соответствующую информацию, определяют время работы ЖРД РСУ для каждой из осей. 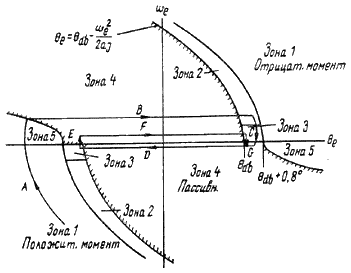 Рис. 24.5. Закон управления ЖРД реактивной системы лунного корабля на пассивных участках траектории полета Логика управления в пассивном полете иллюстрируется диаграммой в фазовой плоскости рис. 24.5. Фазовая плоскость выше оси ?е делится на 5 зон, ограниченных параболами. В логике управления в фазовой плоскости ?е – ?е используется также угловое ускорение, складывающееся из углового ускорения от ЖРД РСУ и возмущающего углового ускорения. Крутизна парабол, ограничивающих зону 2 на фазовой плоскости, соответствует условию, когда на траектории работают ЖРД РСУ. Значения ускорений от ЖРД РСУ, которые определяют эту параболу, подсчитываются в контуре настройки. Парабола, разделяющая зоны 4 и 5, не траекторная. Это пологая кривая, поддерживающая управление с малой угловой скоростью, однако не настолько, чтобы существовали большие ?е. Форма кривой сохранена параболической, чтобы логика границ была общей и удобной для компактности кодирования. Выбранная пологость соответствует угловому ускорению 1,4 град/сек?. Пересечение парабол с осью ?е является функцией зоны нечувствительности ?db, выбираемой астронавтом или программой, выполняющей автоматический маневр. Допустимые ошибки ориентации области зоны нечувствительности могут быть 0,3, 1 и 5°. Фазовая плоскость сконструирована таким образом, что управляющее действие из любых начальных условии с помощью двух главных импульсов приводит к заданной ориентации. На рис. 24.8 это показано сегментом AВС. После перехода в зону нечувствительности состояние аппарата определяется минимальным предельным импульсным циклом DEFG с единичным зажиганием одного ЖРД РСУ каждый раз при пересечении зоны 3.  Рис. 24.6. Закон управления ЖРД реактивной системы лунного корабля на активных участках траектории полета На активных участках траектории полета используется логика управления, показанная на рис. 24.6. Точки пересечения парабол с осью ?e передвигаются в. зависимости от величины расчетного смещающего углового ускорения. Точки пересечения (1°, -2°, 0,75°), показанные на рисунке, типичны для активного участка взлета, когда вектор тяги ЖРД взлетной ступени смещен. Крутизна четырех парабол устанавливается по четырем разностям угловых ускорений. Верхняя левая парабола определяется минимальным ускорением ?min=1,4 град/сек?, как и в случае пассивного полета. Верхняя правая парабола определяется располагаемой разностью ускорений между ускорением от смещающего момента и противоположным по знаку ускорением от ЖРД РСУ. Нижняя правая парабола определяется только смещающим угловым ускорением (ЖРД РСУ не работают). Фазовая плоскость спроектирована так, что аппарат управляется низкочастотным предельным циклом, в котором один раз за цикл дается команда на зажигание ЖРД РСУ и отрабатывается единичный управляющий импульс, противоположный по знаку смещающему моменту. Хотя ЦАП должен выполнять одни и те же функции управления аппаратом, когда лунный корабль состыкован с основным блоком и если он летит один, однако для состыкованной компоновки режим ЦАП разрабатывался отдельно. Особенность проблемы заключалась в том, что в состыкованном виде корабль Apollo имеет 3 формы низкочастотных изгибных колебаний и слабый по прочности переходник, стыкующий основной блок и лунный корабль. Поэтому была разработана специальная логика торможения, исключающая, возможность зажигания ЖРД РСУ с частотой собственных изгибных колебаний корабля Apollo. Кроме законов автоматического управления ориентацией аппарата с помощью ЖРД РСУ были разработаны специальные законы, обеспечивающие ручное управление. По законам ручного управления в зависимости от отклонения рукояток управления ориентацией вырабатываются сигналы на вход. в ЦАП. При доводке характеристик ЦАП с использованием ортогональных осей координат Р, U, V применительно к законам управления ЖРД РСУ в фазовой плоскости относительно каждой отдельной оси было обнаружено перекрестное влияние каналов управления. Распределение массы лунного корабля таково, что главные оси моментов инерции проходят вблизи осей Q и R, а не U и V. В результате, момент от ЖРД оси V порождает угловое ускорение не только относительно оси V, но и относительно оси U. Величина одновременно возникающего перекрестного ускорения такова, что в худшем случае вектор углового ускорения отклоняется на 15° от действующего вектора момента. Чтобы устранить перекрестное влияние каналов управления ЖРД РСУ, была введена неортогональная система осей координат U' и V' (рис. 24.7). Направление осей U' и V' определялось единственным требованием, чтобы направление U' было ортогонально угловому ускорению, возникающему от вектора момента оси V или вектора момента оси Р, направление V было ортогонально угловому ускорению, возникающему от вектора момента оси U или момента оси Р. Управления, определяющие угол ? имеют вид  Находя вектор ошибки ориентации и вектор ошибки угловой скорости на осях U' и V' и используя компоненты U' и V' для определения требуемых векторов моментов ЖРД РСУ по осям U и V, исключается перекрестное влияние каналов управления. 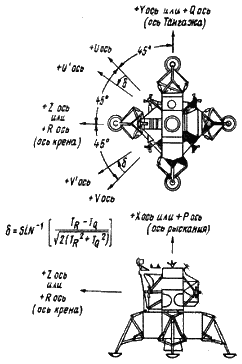 Рис. 24.7. Система неортогональных осей координат лунного корабля При проектировании управления карданом ЖРД для изменения направления вектора тяги посадочной ступени лунного корабля предусматривалось использование этого управления для совмещения вектора тяги с центром масс аппарата и уменьшения таким образом расхода топлива на ЖРД РСУ. Так как управление ориентацией должно обеспечиваться ЖРД РСУ, при проектировании не требовалось задавать большую угловую скорость изменения направления вектора тяги, и был выбран маломощный и легкий привод кардана, обеспечивающий изменение угла отклонения ЖРД со скоростью 0,2 град/сек. Привод связан с ЦАП простым принципом включено-выключено. Для обеих осей Q и R, вокруг которых можно поворачивать вектор тяги, ЦАП может давать команды на угловую скорость 0,2 град/сек; -0,2 град/сек или ноль. Однако минимизация расхода топлива на ЖРД РСУ была основной проблемой, и так как в процессе торможения и посадки ЖРД посадочной ступени работает все время, искали закон управления ориентацией с использованием посадочного ЖРД и без включения ЖРД РСУ по каналам U и V. Выбранному закону соответствует минимальное время управления. Дифференциальное уравнение, связывающее сигнал, управляющий карданом ЖРД, с отклонением лунного корабля от требуемой ориентации относительно осей Q и R, имеет вид  Первая и вторая производные от ошибки ориентации по времени есть ошибка угловой скорости и ошибка углового ускорения. Предполагая, что все переменные состояния, используемые законом управления, измеряются без шума и без ошибок, оптимальное управление можно определить как функцию состояния системы в данный момент следующим образом 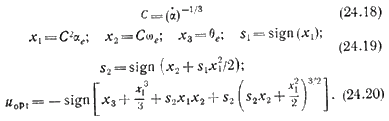 Параметр С имеет размерность – время и обращает переменные состояния (?e, ?e, ?e) в безразмерные переменные (x1, X2, X3). Оптимальный управляющий сигнал uoptдается в безразмерных величинах состояния системы. В процессе первой посадки на Луну ЦАП в начале управлял лунным кораблем в автоматическом режиме и в конце по командам от ручки управления ориентацией; при этом ориентация вектора тяги ЖРД и лунного корабля изменилась от горизонтальной в начале торможения до вертикальной при посадке. Первые 4 мин активного участка торможения после начального неустановившегося режима закон управления ориентацией вектора тяги работал успешно, медленно изменяя ориентацию без помощи ЖРД РСУ по каналам U и V. Затем из-за плескания топлива в баках возникли колебания большой амплитуды, выходящей за пределы зоны нечувствительности закона управления ЖРД РСУ. ЦАП вырабатывал команды управления ЖРД РСУ, ограничивавшие амплитуду колебаний лунного корабля. Колебания угловой скорости тангажа с частотой 0,5 гц из-за плескания топлива видны на рис. 24.8. 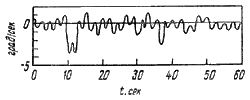 Рис. 24.8. Угловая скорость тангажа на активном участке траектории посадки лунного корабля Apollo-11 Автоматическое управление вело лунный корабль на посадку в кратер размерами с футбольное поле с большим количеством огромных камней. Н. Армстронг переключил ЦАП на ручное управление, изменил курс корабля, перелетел кратер, выбрал ровное место, и посадил корабль с помощью ручного управления. После взлета с Луны управление с помощью ЦАП тангажом взлетной ступени показано на рис. 24.9. После старта и вертикального подъема в течение 10 сек была подана команда на автоматическое управление тантажом со скоростью 10 град/сек и выход на угол тангажа 52°. После окончания маневра по тангажу наблюдался типичный низкочастотный предельный цикл изменения ориентации. Когда было израсходовано все топливо взлетной ступени, ее центр масс переместился из заднего в переднее положение. При взлете центр масс был сзади вектора тяги, после выгорания топлива он переместился в положение впереди вектора тяги. Это явилось причиной изменения компонентов смещения углового ускорения вдоль обеих осей U' и V'. Компонент V' смещения углового ускорения, подсчитанный за последние 150 сек активного участка взлета, показан на рис. 24.10. ЦАП настраивал свои параметры в пределах закона управления ЖРД РСУ и в соответствии с изменяющимся ускорением смещения. 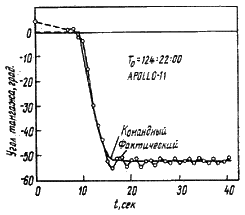 Рис. 24.9 Команды управления по тангажу и фактическое изменение тангажа при взлете с Луны Apollo-11. 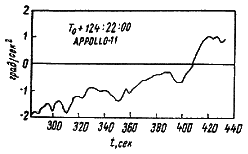 Рис. 24.10. Подсчитанный компонент V' углового ускорения в конце активного участка траектории взлета с Луны Apollo-11. 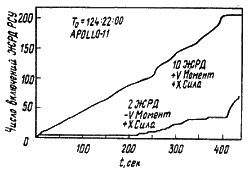 Рис. 24.11. Число включений ЖРД оси V реактивной системы управления на активном участке траектории взлета Apollo-11 Общее число зажиганий ЖРД РСУ оси V в течение всего активного участка взлета показано на рис. 24. 11. После взлета во время маневра по тангажу управление ориентацией вокруг оси V поддерживалось около 200 сек зажиганием только +V ЖРД. Позднее амплитуда предельного цикла увеличилась и для поддержания ориентации стали включаться +V ЖРД и -V ЖРД. Хотя -V момент создает угловое ускорение в том же направлении, в котором действует ускорение смещения от ЖРД взлетной ступени, однако +V момент и -V момент создаются ЖРД РСУ, дающими тягу вверх (+Х) и поэтому не происходит потери AV. Возникновение моментов +V и -V объясняется колебанием взлетной ступени вследствие плескания топлива в баках. Перед концом активного участка взлета после перемены знака смещения углового ускорения не подавалось команд на зажигание +V ЖРД и управление ориентацией поддерживалось вокруг оси V только включением -V ЖРД. [19.] 2.5. Бесплатформенная аварийная система управления лунного корабля Наряду с основной системой управления и навигации, в которой используется гиростабилизированная платформа, лунный корабль имеет бесплатформенную аварийную систему управления и навигации. Основное назначение аварийной системы управления состоят в обеспечении встречи и стыковки лунного корабля с командным отсеком в любой момент их раздельного полета, если отказала основная система управления и навигации. Аварийная система может осуществлять управление кораблем Apollo на любом участке траектории полета Земля-Луна-Земля и это было доказано в полете Apollo-13. Аварийная система управления разработана фирмой TRW (США). Функциональная блок-схема системы представлена на рис. 25.1. Блок чувствительных элементов аварийной системы состоит из трех маятниковых акселерометров, трех гироскопов и электронного оборудования. Оси чувствительных элементов образуют ортогональный трехгранник и параллельны осям тангажа, рыскания и крена. Чувствительные элементы выдают информацию при помощи импульсных датчиков моментов со следующими характеристиками. 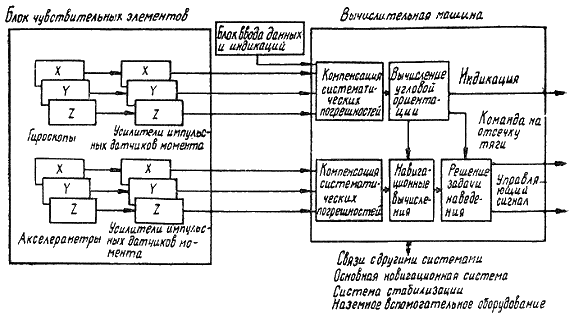 Рис. 25.1. Блок-схема бесплатформенной аварийной системы управления лунным кораблем 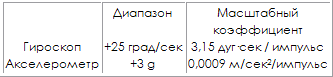 Чувствительные элементы монтируются на прецизионной-установочной раме, привязка которой к корпусу корабля осуществляется с помощью прецизионных поверхностей. Никаких приспособлений для изоляции вибраций не применяется. Бортовая ЭЦВМ аварийной системы управления универсального типа имеет запоминающее устройство на 4096 слов и решает задачи управления и навигации. Опорная система координации задается матрицей направляющих косинусов, характеризующей ориентацию приборных осей и осей инерциальной системы координат. Коррекция направляющих косинусов по измерениям гироскопов производится каждые 20 сек. Измеренные по связанным осям составляющие приращения скорости преобразуются в инерциальную систему координат каждые 40 мсек. Программа полета предусматривает автономную первоначальную выставку и калибровку приборов. Двумя участками, на которых работа аварийной системы управления в максимальной степени подвержена влиянию динамики полета лунного корабля, являются участки спуска и подъема (обычно разделенные отрезком времени, в течение которого лунный корабль находится на поверхности Луны). На каждом участке – при посадке на Луну и взлете с Луны – производится изменение скорости на 1830 м/сек в течение 10 мин, сопровождающееся маневрами разворота, предельными циклами и вибрацией. Перед началом спуска с орбиты ИСЛ осуществляется начальная выставка координат аварийной системы управления по данным основной системы управления и навигации, определяется начальное значение навигационного вектора состояния и производится компенсация смещений гироскопов и акселерометров. Смещение нулей гироскопов определяется путем сравнения с данными ориентации, вырабатываемыми основной системой управления и навигации; нули акселерометров определяются по сигналам, снимаемым с чувствительных элементов аварийной системы на пассивном участке траектории. На поверхности Луны вторично производятся выставка и определение смещения нулей чувствительных элементов. После отделения лунного корабля от командного отсека аварийная система работает в режиме дублирования основной системы управления и навигации, осуществляющей спуск корабля. В фазе торможения при заходе на посадку с работающим ЖРД, если возникнет аварийная ситуация и переход на аварийную систему управления, система должна вывести лунный корабль на безопасную орбиту и обеспечить встречу и стыковку с командным отсеком. В условиях нормального снижения и посадки аварийная система используется для подтверждения правильности работы основной системы управления и навигадии. В случае отказа основной системы управления после перехода на ручное управление посадкой лунного корабля аварийная система должна выдавать информацию об ориентации корабля. Сразу же после посадки на поверхность Луны аварийная система переводится на режим расчета навигационных задач старта с Луны и встречи с командным отсеком. При нормальных условиях взлета с Луны аварийная система дублирует основную систему управления и навигации. [23.] Для оценки точности аварийной системы управления сравнивались значения параметров траектории полета корабля, определенных наземной сетью связи и слежения, основной системой управления и навигации и аварийной системой. Полученные результаты при обработке трех траекторий полетов Apollo-10, Apollo-11 и Apollo-12 хорошо согласуются между собой. Погрешность в определении аварийной системой скорости при спуске на Луну не превышает 1,2 м/сек при значении измеряемой величины до 1800 м/сек. 1. Hardy G. Н. Man's role in launch vechicle guidance and control. AIAA Paper № 69—876. ЭИ АиР, 1970, № 17; РЖ, 1970, 5.41.182 2. Kurkowski R. L., and Hardy G. Н., Gordon Н., Saturn V manual backup guidance and control piloted simulation study. NASA TN D-4481, 1968 3. Lemon R. S., and Stern A. D. Spacecraft backup guidance and control for the Saturn V launch vechicle. The Boeing Co., Doc. No D2—118176—1. Jan. 13, 1969 4. Ваlsam R. E., Anzel В. М. A simplified approach for correction of perturbations on a stationary oirbit. AIAA Paper № 68—456, (ЭИ АиР, 1969, № 7); РЖ, 1968, 12.41.47 5. Gilchrist J. D., Sоland D. E. A manual optimal guidance scheme using a predictive model. J. Spacecraft and Rockets, 1968, 5, № 10, ЭИ АиР, 1969, № 7; РЖ, 1969, 5.41.206 6. Anderson P. A., and Gilchrist J. D., Manual optimal guidance techniques. National Space Meeting of the Institute of Navigation, Feb. 20, 1968, Cocoa Beach, Fla. РЖ, 1969, 6.41.217 7. Edelbaum T. N. Minimum impulse guidance. AIAA Paper № 69—74, ЭИ АиР, 1969, № 33; РЖ, 1969, 10.41.107 8. Evans F. A., Wilcox J. C. Experimental strapdown redundant sensor inertial navigation system. AIAA Paper № 69—851, ЭИ АиР, 1970, № 13; РЖ, 1970, 5.41.224 9. Webber R. F. Performance of the lunar module, powered flight, tracking data processor during the Apollo 12 mission. AIAA Paper № 70—1020, ЭИ АиР, 1971, № 8; РЖ, 1971, 2.41.272 10. Роwers W. F., Mc Dannell J. P. Switching conditions and a synthesis technique for the singular Saturn guidance problem. AIAA Paper № 70—965, ЭИ АиР, 1971, № 15; РЖ, 1971, 3.41.59 11. Luh J. Y. S., Maguiraga M. Minimum trajectory sensitivity of a large launch booster control system. IEEE Trans. Aerospace and Electron. System., 1969, 5, № 2, ЭИ AиР, 1969, № 39; РЖ, 1969, 11.41.200 12. Horn Н. J., Chandler D. C., Buckelew V. L. Iterative guidance applied to generalized missions. J. Spacecraft and Rockets, 1969, 6, № 1, ЭИ АнР, 1969, № 39: РЖ, 1969, 10.41.264 13. Мartin F. Н., Battin R. H. Computer—controlled steering of the Apollo' spacecraft. J. Spacecraft and Rockets, 1968, 5, № 4, (ЭН АиР, 1968, № 30); РЖ, 1968, 10.41.252 14. Mc Ruer D. Т., Weir D. Н., Klein R. Н. A pilot-vehicle systems approach to longitudinal flight director design. AIAA Paper № 70—1001, (ЭИ АиР, 1971, № 13) 15. Сhen P. P. Real—time Kalman filtering of Apollo LM/AGS rendezvous radar data. AIAA Paper, № 70—957, ЭИ АиР, 1971, № 10; РЖ 1971, 2.41.273 16. Satin A. L., Рixley P. T. Statistics of state—vector corrections for Apollo onboard computers. AIAA Paper, № 70—162, ЭИ АиР 1970 № 33; РЖ, 1970, 10.41.255 17. Bielkowicz P., Horrigan R. C., Walsh R. C., Manual onboard methods of orbit determination. AIAA Paper, № 70—159, (ЭИ АиР, 1970, № 33) 18. Salinger S. N., Brandstaller J. J. Application of recursive estimation and Kalman filtering to Doppler tracking. IEEE Trans. Aerospасе and Electron. Syst, 1970, 6, № 4, ЭИ АиР, 1970. № 45; РЖ, 1970, 12.41.220 19. Cox K. J. Apollo reaction control systems. IEEE Transection automatic control,IEEE №9C41-AC, Aug.4, 1969 20. Stubbs G.S., Penchuk A., Schlundt R.W Digital autopilot for thrust vector control of the Apollo CSM and CSM/LM vehicles. AIAA Paper № 69—847 21. Miller J. E., Laats Ain. Apollo guidance and control system flight experience. AIAA Paper № 69—891 22. Stengel R. F. Manual attitude control of the Lunar Module. AIAA Paper № 69—892 23. Mason W. L., Wedekind D. E. Prediction and measurement of strap-down inertial measurement unit performence on lunar missions. AIAA Paper № 70—1028 Глава III 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19 |
|||||||