 |
|
Популярные авторы:: БСЭ :: Борхес Хорхе Луис :: Горький Максим :: Азимов Айзек :: Херберт Фрэнк :: Чехов Антон Павлович :: Раззаков Федор :: Толстой Лев Николаевич :: Грин Александр :: Астафьев Виктор Петрович Популярные книги:: Дюна (Книги 1-3) :: The Boarding House :: Три цвета времени :: Упражнения по стилистике русского языка :: Преодоление :: Талисман из Рэдволла :: Плацдарм :: Закрой рот, джинн – кишки простудишь… :: Авантюристка :: Андропов. 7 тайн генсека с Лубянки |
Большая Советская Энциклопедия (УП)ModernLib.Net / Энциклопедии / БСЭ / Большая Советская Энциклопедия (УП) - Чтение (стр. 7)
В
(2)
В РӨазРҫРІСӢР№ РҝРҫСҖСӮСҖРөСӮ СӮР°РәРҫР№ СҒРёСҒСӮРөРјСӢ РёР·РҫРұСҖажРөРҪ РҪР° СҖРёСҒ. 2 , Рұ; РёР· Р°РҪализа РҝРҫСҖСӮСҖРөСӮР° СҒР»РөРҙСғРөСӮ, СҮСӮРҫ РёР·РҫРұСҖажаСҺСүР°СҸ СӮРҫСҮРәР° РёР· РҝСҖРҫРёР·РІРҫР»СҢРҪРҫРіРҫ РҪР°СҮалСҢРҪРҫРіРҫ РҝРҫР»РҫР¶РөРҪРёСҸ РҝРҫРҝР°РҙР°РөСӮ РҪР° РҝСҖСҸРјСғСҺ s =0, РҝСҖРҫС…РҫРҙСҸСүСғСҺ СҮРөСҖРөР· РҪР°СҮалРҫ РәРҫРҫСҖРҙРёРҪР°СӮ, РІ РҫРәСҖРөСҒСӮРҪРҫСҒСӮРё РәРҫСӮРҫСҖРҫР№ фазРҫРІСӢРө СӮСҖР°РөРәСӮРҫСҖРёРё РҪР°РҝСҖавлРөРҪСӢ РҪавСҒСӮСҖРөСҮСғ РҙСҖСғРі РҙСҖСғРіСғ Рё, СҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ, РёР·РҫРұСҖажаСҺСүР°СҸ СӮРҫСҮРәР° РҪРө РјРҫР¶РөСӮ РҝРҫРәРёРҪСғСӮСҢ СҚСӮСғ РҝСҖСҸРјСғСҺ. РўСҖР°РөРәСӮРҫСҖРёСҸ s= 0 РҪРө РҝСҖРёРҪР°РҙР»РөжиСӮ РҪРё РҫРҙРҪРҫР№ РёР· СҒСӮСҖСғРәСӮСғСҖ (I или II), РҝРҫСҚСӮРҫРјСғ, СҒРҫглаСҒРҪРҫ (2), Р·Р° СҒСҮС‘СӮ РҝРөСҖРөРәР»СҺСҮРөРҪРёСҸ СғРҝСҖавлРөРҪРёСҸ Рё РІ СҒРёСҒСӮРөРјРө РҝСҖРҫРёСҒС…РҫРҙРёСӮ СҒРјРөРҪР° СҒСӮСҖСғРәСӮСғСҖ СӮРөРҫСҖРөСӮРёСҮРөСҒРәРё СҒ РұРөСҒРәРҫРҪРөСҮРҪРҫР№ СҮР°СҒСӮРҫСӮРҫР№. РўР°РәРҫР№ СҖРөжим РҙРІРёР¶РөРҪРёСҸ РҪазСӢРІР°РөСӮСҒСҸ СҒРәРҫР»СҢР·СҸСүРёРј, Р° Р·Р° СғСҖавРҪРөРҪРёРө РҙРІРёР¶РөРҪРёСҸ РҝСҖРёРҪРёРјР°РөСӮСҒСҸ СғСҖавРҪРөРҪРёРө РҝСҖСҸРјРҫР№ s= 0: В
В Р’СҒРө СҖРөСҲРөРҪРёСҸ СғСҖавРҪРөРҪРёСҸ (3) СҒСӮСҖРөРјСҸСӮСҒСҸ Рә РҪСғР»СҺ РҝСҖРё tВ® Тҗ, СӮ. Рө. РҝРҫСҒСӮавлРөРҪРҪР°СҸ Р·Р°РҙР°СҮР° СҖРөСҲРөРҪР°. РЎСғСүРөСҒСӮРІРөРҪРҪРҫ, СҮСӮРҫ РҙРІРёР¶РөРҪРёРө СҒРёСҒСӮРөРјСӢ РІ СҒРәРҫР»СҢР·СҸСүРөРј СҖРөжимРө РҪРө завиСҒРёСӮ РҫСӮ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРә РҫРұСҠРөРәСӮР° СғРҝСҖавлРөРҪРёСҸ Рё РәРҫСҚффиСҶРёРөРҪСӮ РҫРұСҖР°СӮРҪРҫР№ СҒРІСҸР·Рё, РәР°СҮРөСҒСӮРІРҫ РҝРөСҖРөС…РҫРҙРҪРҫРіРҫ РҝСҖРҫСҶРөСҒСҒР° РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ СӮРҫР»СҢРәРҫ РІСӢРұРҫСҖРҫРј РҝР°СҖамРөСӮСҖР° СҒ. В Р Р°СҒСҒРјРҫСӮСҖРөРҪРҪСӢР№ РҝСҖРёРјРөСҖ РҝРҫРәазСӢРІР°РөСӮ, СҮСӮРҫ РҝРҫСҒСҖРөРҙСҒСӮРІРҫРј СҒРҫСҮРөСӮР°РҪРёСҸ РҪРөРҝСҖРёРөРјР»РөРјСӢС… РҝРҫСҖРҫР·РҪСҢ СҒСӮСҖСғРәСӮСғСҖ Рё Р·Р° СҒСҮС‘СӮ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ СҒРәРҫР»СҢР·СҸСүРёС… СҖРөжимРҫРІ РјРҫР¶РҪРҫ СҒРёРҪСӮРөР·РёСҖРҫРІР°СӮСҢ РЎРҹРЎ, РҫРұлаРҙР°СҺСүРёРө СҖСҸРҙРҫРј РҝРҫР»РҫжиСӮРөР»СҢРҪСӢС… СҒРІРҫР№СҒСӮРІ, РІ СҮР°СҒСӮРҪРҫСҒСӮРё Р°РҝРөСҖРёРҫРҙРёСҮРөСҒРәРҫР№ Рё РҝР°СҖамРөСӮСҖРёСҮРөСҒРәРҫР№ .РЎ РҝРҫРјРҫСүСҢСҺ РЎРҹРЎ СҖРөСҲР°РөСӮСҒСҸ СҲРёСҖРҫРәРёР№ РәСҖСғРі Р·Р°РҙР°СҮ СӮРөРҫСҖРёРё СғРҝСҖавлРөРҪРёСҸ, РҪР°РҝСҖРёРјРөСҖ Р·Р°РҙР°СҮРё РІСӢСҒРҫРәРҫРәР°СҮРөСҒСӮРІРөРҪРҪРҫРіРҫ РІРҫСҒРҝСҖРҫРёР·РІРөРҙРөРҪРёСҸ Р·Р°РҙР°СҺСүРөРіРҫ РІРҫР·РҙРөР№СҒСӮРІРёСҸ РҝСҖРё РёРҪРІР°СҖРёР°РҪСӮРҪРҫСҒСӮРё Рә РҝР°СҖамРөСӮСҖРёСҮРөСҒРәРёРј Рё РІРҪРөСҲРҪРёРј РІРҫР·РјСғСүРөРҪРёСҸРј, РјРҪРҫРіРҫСҒРІСҸР·РҪРҫРіРҫ СҖРөРіСғлиСҖРҫРІР°РҪРёСҸ, РҫРҝСӮРёРјРёР·Р°СҶРёРё Рё РҙСҖ. В РӣРёСӮ.:ЕмРөР»СҢСҸРҪРҫРІ РЎ. Р’., РЎРёСҒСӮРөРјСӢ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ СҒ РҝРөСҖРөРјРөРҪРҪРҫР№ СҒСӮСҖСғРәСӮСғСҖРҫР№, Рң., 1967; РЎРёСҒСӮРөРјСӢ СҒ РҝРөСҖРөРјРөРҪРҪРҫР№ СҒСӮСҖСғРәСӮСғСҖРҫР№ Рё РёС… РҝСҖРёРјРөРҪРөРҪРёРө РІ Р·Р°РҙР°СҮах авСӮРҫРјР°СӮРёР·Р°СҶРёРё РҝРҫлёСӮР°, Рң., 1968; РўРөРҫСҖРёСҸ СҒРёСҒСӮРөРј СҒ РҝРөСҖРөРјРөРҪРҪРҫР№ СҒСӮСҖСғРәСӮСғСҖРҫР№, Рң., 1970; РЈСӮРәРёРҪ Р’. Рҳ., РЎРәРҫР»СҢР·СҸСүРёРө СҖРөжимСӢ Рё РёС… РҝСҖРёРјРөРҪРөРҪРёСҸ РІ СҒРёСҒСӮРөмах СҒ РҝРөСҖРөРјРөРҪРҪРҫР№ СҒСӮСҖСғРәСӮСғСҖРҫР№, Рң., 1974. В Р‘. Р—. Р“РҫР»РөРјРұРҫ, РЎ. Рҡ. РҡРҫСҖРҫРІРёРҪ. 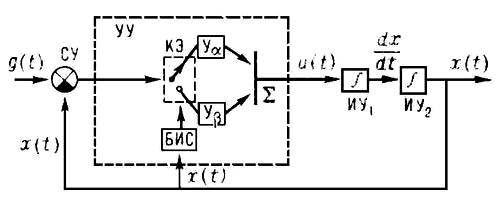
Р РёСҒ. 1. РӨСғРҪРәСҶРёРҫРҪалСҢРҪР°СҸ СҒС…РөРјР° СҒРёСҒСӮРөРјСӢ СғРҝСҖавлРөРҪРёСҸ СҒ РҝРөСҖРөРјРөРҪРҪРҫР№ СҒСӮСҖСғРәСӮСғСҖРҫР№: РЈРЈ вҖ” СғСҒСӮСҖРҫР№СҒСӮРІРҫ СғРҝСҖавлРөРҪРёСҸ; РЎРЈ вҖ” СҒСҖавРҪРёРІР°СҺСүРөРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ; РҡРӯ вҖ” РәР»СҺСҮРөРІРҫР№ СҚР»РөРјРөРҪСӮ; Р‘РҳРЎ вҖ” РұР»РҫРә РёР·РјРөРҪРөРҪРёСҸ СҒСӮСҖСғРәСӮСғСҖСӢ; вҖ” СҒСғРјРјР°СӮРҫСҖ; РЈ aвҖ” СғСҒилиСӮРөР»СҢ СҒ РәРҫСҚффиСҶРёРөРҪСӮРҫРј РҝРөСҖРөРҙР°СҮРё a; РЈ bвҖ” СғСҒилиСӮРөР»СҢ СҒ РәРҫСҚффиСҶРёРөРҪСӮРҫРјВ РҝРөСҖРөРҙР°СҮРё b; РҳРЈ вҖ” РёРҪСӮРөРіСҖРёСҖСғСҺСүРёРө СғСҒСӮСҖРҫР№СҒСӮРІР°; g(t) вҖ” Р·Р°РҙР°СҺСүРөРө РІРҫР·РҙРөР№СҒСӮРІРёРө; u(t) вҖ” СғРҝСҖавлСҸСҺСүРөРө РІРҫР·РҙРөР№СҒСӮРІРёРө; x(t) вҖ” СғРҝСҖавлСҸРөРјР°СҸ РІРөлиСҮРёРҪР°. 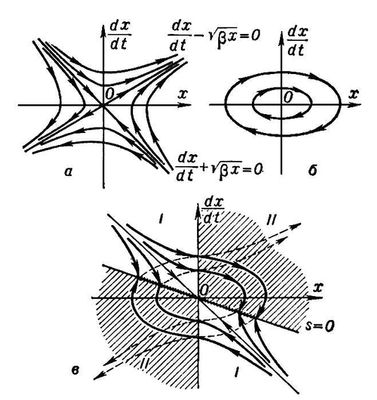
Р РёСҒ. 2. РӨазРҫРІСӢРө РҝРҫСҖСӮСҖРөСӮСӢ СҒРёСҒСӮРөРј авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ: Р° вҖ” СҒ РҝРҫР»РҫжиСӮРөР»СҢРҪРҫР№ РҫРұСҖР°СӮРҪРҫР№ СҒРІСҸР·СҢСҺ (СҒСӮСҖСғРәСӮСғСҖР° I); Рұ вҖ” СҒ РҫСӮСҖРёСҶР°СӮРөР»СҢРҪРҫР№ РҫРұСҖР°СӮРҪРҫР№ СҒРІСҸР·СҢСҺ (СҒСӮСҖСғРәСӮСғСҖР° II); РІ вҖ” СҒ РҝРөСҖРөРјРөРҪРҪРҫР№ СҒСӮСҖСғРәСӮСғСҖРҫР№; I вҖ” РҫРұлаСҒСӮСҢ РҙРІРёР¶РөРҪРёСҸ СҒРёСҒСӮРөРјСӢ СҒРҫ СҒСӮСҖСғРәСӮСғСҖРҫР№ I; II вҖ” РҫРұлаСҒСӮСҢ РҙРІРёР¶РөРҪРёСҸ СҒРёСҒСӮРөРјСӢ СҒРҫ СҒСӮСҖСғРәСӮСғСҖРҫР№ II; 0 вҖ” РҪР°СҮалРҫ РәРҫРҫСҖРҙРёРҪР°СӮ; x вҖ” СғРҝСҖавлСҸРөРјР°СҸ РІРөлиСҮРёРҪР°; t вҖ” РІСҖРөРјСҸ. РЈРҝСҖавлРөРҪРёСҸ СғСҖРҫРІРҪРё РЈРҝСҖавлРө'РҪРёСҸ Сғ'СҖРҫРІРҪРё,РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪСӢРө РіСҖР°РҙР°СҶРёРё СҒРҫРІРҫРәСғРҝРҪРҫСҒСӮРөР№ СҚР»РөРјРөРҪСӮРҫРІ СғРҝСҖавлРөРҪРёСҸ ,СҒРіСҖСғРҝРҝРёСҖРҫРІР°РҪРҪСӢС… Рё РІСӢРҙРөР»РөРҪРҪСӢС… РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ .РӯР»РөРјРөРҪСӮСӢ СғРҝСҖавлРөРҪРёСҸ СҖазРҪСӢС… СғСҖРҫРІРҪРөР№ взаимРҫСҒРІСҸР·Р°РҪСӢ Рё РёРјРөСҺСӮ СҮС‘СӮРәРҫРө РҝРҫРҙСҮРёРҪРөРҪРёРө. Р’ РёРөСҖР°СҖС…РёСҮРөСҒРәРёС… СҒРёСҒСӮРөмах СғРҝСҖавлРөРҪРёСҸ РәажРҙРҫРө РҝРҫРҙСҖазРҙРөР»РөРҪРёРө (РҝРҫРҙСҒРёСҒСӮРөРјР°) СҖРөСҲР°РөСӮ Р·Р°РҙР°СҮРё СӮРҫР»СҢРәРҫ СҒРІРҫРөРіРҫ СғСҖРҫРІРҪСҸ; РёСҒС…РҫРҙРҪР°СҸ РёРҪС„РҫСҖРјР°СҶРёСҸ РҙР»СҸ РҝСҖРёРҪСҸСӮРёСҸ СҖРөСҲРөРҪРёСҸ Рё РІСӢСҖР°РұРҫСӮРәРё СғРҝСҖавлСҸСҺСүРёС… РІРҫР·РҙРөР№СҒСӮРІРёР№ РҝРөСҖРөРҙаёСӮСҒСҸ СҒРҪРёР·Сғ РІРІРөСҖС…, Р° СғРҝСҖавлСҸСҺСүР°СҸ РёРҪС„РҫСҖРјР°СҶРёСҸ (РІРҫР·РҙРөР№СҒСӮРІРёСҸ) вҖ“ СҒРІРөСҖС…Сғ РІРҪРёР·. РқР°РҝСҖРёРјРөСҖ, РІ (РҰР’Рң) СҖР°РұРҫСӮСғ РҫСӮРҙРөР»СҢРҪСӢС… СғСҒСӮСҖРҫР№СҒСӮРІ ( , Рё РҙСҖ.) РәРҫРҫСҖРҙРёРҪРёСҖСғРөСӮ (РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р·Р°РҙР°РҪРҪРҫР№ РҝСҖРҫРіСҖаммРҫР№ РІСӢСҮРёСҒР»РөРҪРёР№) СҶРөРҪСӮСҖалСҢРҪРҫРө ,РҫРҙРҪРёРј РёР· СҚР»РөРјРөРҪСӮРҫРІ РәРҫСӮРҫСҖРҫРіРҫ СҸРІР»СҸРөСӮСҒСҸ РҰР’Рң (РІСӢСҒСҲРёР№ РЈ. Сғ.). РңРөСҒСӮРҪСӢРө СғСҒСӮСҖРҫР№СҒСӮРІР° СғРҝСҖавлРөРҪРёСҸ (РҪРёР·СҲРёР№ РЈ. Сғ.) РҝРҫ РәРҫРјР°РҪРҙам СҶРөРҪСӮСҖалСҢРҪРҫРіРҫ СғСҒСӮСҖРҫР№СҒСӮРІР° СғРҝСҖавлРөРҪРёСҸ РІСӢСҖР°РұР°СӮСӢРІР°СҺСӮ (РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ СҒРҫРұСҒСӮРІРөРҪРҪСӢРј С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°РҪРёСҸ) СҒРёРіРҪалСӢ РҪР° РІСӢРҝРҫР»РҪРөРҪРёРө РҫСӮРҙРөР»СҢРҪСӢС… РҫРҝРөСҖР°СҶРёР№, РәРҫСӮРҫСҖСӢРө РІ СҒРҫРІРҫРәСғРҝРҪРҫСҒСӮРё РҝСҖРөРҙСҒСӮавлСҸСҺСӮ СҒРҫРұРҫР№ РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢР№ РҝСҖРҫСҶРөСҒСҒ. Р’ авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°РҪРҪСӢС… СҒРёСҒСӮРөмах СғРҝСҖавлРөРҪРёСҸ СӮРөС…РҪРҫР»РҫРіРёСҮРөСҒРәРёРјРё РҝСҖРҫСҶРөСҒСҒами (РҗРЎРЈРўРҹ) авСӮРҫРјР°СӮРёСҮРөСҒРәРёРө ,СғРҝСҖавлСҸСҺСүРёРө СҖР°РұРҫСӮРҫР№ РёСҒРҝРҫР»РҪРёСӮРөР»СҢРҪСӢС… РјРөС…Р°РҪРёР·РјРҫРІ Рё СҖР°РұРҫСҮРёС… РјР°СҲРёРҪ, Рё (РҙР°СӮСҮРёРәРё), РҫСҒСғСүРөСҒСӮРІР»СҸСҺСүРёРө РәРҫРҪСӮСҖРҫР»СҢ Р·Р° С…РҫРҙРҫРј СӮРөС…РҪРҫР»РҫРіРёСҮРөСҒРәРҫРіРҫ РҝСҖРҫСҶРөСҒСҒР°, СҒРҫСҒСӮавлСҸСҺСӮ РҪРёР·СҲРёР№ РЈ. Сғ. РҡРҫРҪСӮСҖРҫР»СҢРҪРҫ-РёР·РјРөСҖРёСӮРөР»СҢРҪР°СҸ РёРҪС„РҫСҖРјР°СҶРёСҸ СҒ РҙР°СӮСҮРёРәРҫРІ РҝРҫСҒСӮСғРҝР°РөСӮ РҪР° РҝСғР»СҢСӮ СғРҝСҖавлРөРҪРёСҸ РҙРёСҒРҝРөСӮСҮРөСҖР° или РІ СғРҝСҖавлСҸСҺСүСғСҺ РӯР’Рң (РІСӢСҒСҲРёР№ СғСҖРҫРІРөРҪСҢ), РәРҫСӮРҫСҖСӢРө РҫСҶРөРҪРёРІР°СҺСӮ РҝСҖавилСҢРҪРҫСҒСӮСҢ РІСӢРҝРҫР»РҪРөРҪРёСҸ СҖР°РұРҫСҮРёС… РҫРҝРөСҖР°СҶРёР№ Рё РІСӢСҖР°РұР°СӮСӢРІР°СҺСӮ РәРҫРјР°РҪРҙСӢ, РҝРҫСҒСӮСғРҝР°СҺСүРёРө РҪР° СҚР»РөРјРөРҪСӮСӢ РҪРёР·СҲРөРіРҫ РЈ. Сғ. (СҒРј. РІ СӮРөС…РҪРёРәРө). Р’ РұРҫР»РөРө СҒР»РҫР¶РҪСӢС… СҒРёСҒСӮРөмах, РҪР°РҝСҖРёРјРөСҖ РІ авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°РҪРҪСӢС… СҒРёСҒСӮРөмах СғРҝСҖавлРөРҪРёСҸ РҫСӮСҖР°СҒР»СҢСҺ (РһРҗРЎРЈ) Рё РҝСҖРөРҙРҝСҖРёСҸСӮРёРөРј (РҗРЎРЈРҹ), РІ РөРҙРёРҪСӢС… СҚРҪРөСҖРіРҫСҒРёСҒСӮРөмах РІСӢРҙРөР»СҸСҺСӮ 3 Рё РұРҫР»РөРө РЈ. Сғ.  РазРҙРөР»РөРҪРёРө С„СғРҪРәСҶРёРё СғРҝСҖавлРөРҪРёСҸ РҝРҫ РЈ. Сғ. РІ СҒР»РҫР¶РҪСӢС… СҒРёСҒСӮРөмах РҝРҫР·РІРҫР»СҸРөСӮ РҫРіСҖР°РҪРёСҮРёСӮСҢ РәСҖСғРі Р·Р°РҙР°СҮ, СҖРөСҲР°РөРјСӢС… РәажРҙСӢРј РҝРҫРҙСҖазРҙРөР»РөРҪРёРөРј, СғРҝРҫСҖСҸРҙРҫСҮРёСӮСҢ СҖР°СҒРҝСҖРөРҙРөР»РөРҪРёРө РёРҪС„РҫСҖРјР°СҶРёРё РјРөР¶РҙСғ СҚР»РөРјРөРҪСӮами СғРҝСҖавлРөРҪРёСҸ, СғРҝСҖРҫСҒСӮРёСӮСҢ РҫСӮСҮС‘СӮРҪРҫСҒСӮСҢ Рё СҒРҫРәСҖР°СӮРёСӮСҢ СҮРёСҒР»Рҫ СҖазРҪРҫРІРёРҙРҪРҫСҒСӮРөР№ РҙРҫРәСғРјРөРҪСӮР°СҶРёРё, СғР»СғСҮСҲРёСӮСҢ РәР°СҮРөСҒСӮРІРҫ РҝСҖРёРҪРёРјР°РөРјСӢС… СҖРөСҲРөРҪРёР№. В РӣРёСӮ.СҒРј. РҝСҖРё СҒСӮ. . РЈРҝСҖавлРөРҪСҮРөСҒРәРҫР№ СҖРөРІРҫР»СҺСҶРёРё СӮРөРҫСҖРёСҸ РЈРҝСҖавлРө'РҪСҮРөСҒРәРҫР№ СҖРөРІРҫР»СҺ'СҶРёРё СӮРөРҫ'СҖРёСҸ,СӮРөРҫСҖРёСҸ В«СҖРөРІРҫР»СҺСҶРёРё СғРҝСҖавлСҸСҺСүРёС…В», РҫРҙРҪР° РёР· СҒРҫРІСҖРөРјРөРҪРҪРҫР№ РұСғСҖР¶СғазРҪРҫР№ СҒРҫСҶиалСҢРҪРҫ-СҚРәРҫРҪРҫРјРёСҮРөСҒРәРҫР№ РјСӢСҒли, РІСӢРҙРІРёРіР°СҺСүР°СҸ СӮРөР·РёСҒ Рҫ СҸРәРҫРұСӢ РҝСҖРҫРёР·РҫСҲРөРҙСҲРөРј СғСҒСӮСҖР°РҪРөРҪРёРё влаСҒСӮРё РәР°РҝРёСӮалиСҒСӮРҫРІ-СҒРҫРұСҒСӮРІРөРҪРҪРёРәРҫРІ РҪР°Рҙ РәРҫСҖРҝРҫСҖР°СҶРёСҸРјРё Рё РұР°РҪРәами Рё РҝРөСҖРөС…РҫРҙРө РөС‘ РІ СҖСғРәРё СҒРҝРөСҶиалиСҒСӮРҫРІ-СғРҝСҖавлСҸСҺСүРёС…, СӮРөС…РҪРҫРәСҖР°СӮРҫРІ Рё РұСҺСҖРҫРәСҖР°СӮРҫРІ. РҳСҒРҝРҫР»СҢР·СғРөСӮ РҙР»СҸ РҫРұРҫСҒРҪРҫРІР°РҪРёСҸ СҚСӮРҫРіРҫ СӮРөР·РёСҒР° РҝРөСҖРөС…РҫРҙ Рә Р°РәСҶРёРҫРҪРөСҖРҪРҫР№ С„РҫСҖРјРө РҝСҖРөРҙРҝСҖРёСҸСӮРёР№ Рё РҪРҫРІСғСҺ СҖРҫР»СҢ СғРҝСҖавлРөРҪСҮРөСҒРәРёС… Рё РёРҪР¶РөРҪРөСҖРҪРҫ-РҫСҖРіР°РҪРёР·Р°СҶРёРҫРҪРҪСӢС… РҪР°СғРә РІ РәР°РҝРёСӮалиСҒСӮРёСҮРөСҒРәРҫРј РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРө. РҜРІР»СҸРөСӮСҒСҸ СҒРҫСҒСӮавРҪРҫР№ СҮР°СҒСӮСҢСҺ .Р СҸРҙ РөС‘ РҝРҫР»РҫР¶РөРҪРёР№ СҒС„РҫСҖРјСғлиСҖРҫРІР°РҪ РІ 30-Рө РіРі. 20 РІ. РІ СҖР°РұРҫСӮах Р“. Рё Рҗ. Р‘РөСҖли (РЎРЁРҗ) РІ РІРёРҙРө СӮРөРҫСҖРёР№ РәРҫСҖРҝРҫСҖР°СӮРёРІРҪРҫР№ СҖРөРІРҫР»СҺСҶРёРё Рё РәРҫРҪСӮСҖРҫР»СҸ .РЎС„РҫСҖРјРёСҖРҫвалаСҒСҢ РәР°Рә РәРҫРҪСҶРөРҝСҶРёСҸ РІ 40-Рө РіРі. РІ СҖР°РұРҫСӮах амРөСҖ. СҚРәРҫРҪРҫРјРёСҒСӮРҫРІ Дж. БёСҖРҪС…РөРјР° (СӮРөРҫСҖРёСҸ РҪРҫРІРҫР№ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮРё Рё РҪРҫРІРҫРіРҫ РіРҫСҒРҝРҫРҙСҒСӮРІСғСҺСүРөРіРҫ РәлаСҒСҒР°) Рё Рҹ. Р”СҖСғРәРөСҖР° (СӮРөРҫСҖРёСҸ РҪРҫРІРҫРіРҫ РҫРұСүРөСҒСӮРІР°, СӮРөРҫСҖРёСҸ С„СғРҪРәСҶРёР№ СғРҝСҖавлРөРҪРёСҸ). Р’ РәРҫРҪСҶРө 60вҖ“70-С… РіРі. РҝСҖРҫРҝагаРҪРҙРёСҖСғРөСӮСҒСҸ Дж. (СӮРөРҫСҖРёСҸ СӮРөС…РҪРҫСҒСӮСҖСғРәСӮСғСҖСӢ, СӮРөРҫСҖРёСҸ РҪРҫРІРҫР№ РәРҫСҖРҝРҫСҖР°СҶРёРё). РҳСҒРҝРҫР»СҢР·РҫРІР°РҪР° РІ СҖР°РұРҫСӮах Рӣ. (РӨСҖР°РҪСҶРёСҸ), Дж. (Р’РөлиРәРҫРұСҖРёСӮР°РҪРёСҸ), Рҡ. Р РөРҪРҪРөСҖР° (РҗРІСҒСӮСҖРёСҸ), СҺРіРҫСҒР». СҖРөРІРёР·РёРҫРҪРёСҒСӮР° Рң. ДжилаСҒР° Рё РҙСҖ. РҙР»СҸ Р·Р°СӮСғСҲРөРІСӢРІР°РҪРёСҸ РәРҫСҖРөРҪРҪРҫРіРҫ СҖазлиСҮРёСҸ РјРөР¶РҙСғ РәР°РҝРёСӮализмРҫРј Рё СҒРҫСҶиализмРҫРј. В Р’ 3-Рј СӮРҫРјРө В«РҡР°РҝРёСӮала» Рҡ. РңР°СҖРәСҒ РҝРҫРәазал, СҮСӮРҫ РІ РҝСҖРҫРёСҒС…РҫРҙРёСӮ РҪРө СӮРҫР»СҢРәРҫ РҫСӮРҙРөР»РөРҪРёРө РІРөРҙСғСүРөРіРҫ РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРҫ «фСғРҪРәСҶРёРҫРҪРёСҖСғСҺСүРөРіРҫ РәР°РҝРёСӮалиСҒСӮа» (СҒРҫРұСҒСӮРІРөРҪРҪРёРәР° лиСҲСҢ СҮР°СҒСӮРё РәР°РҝРёСӮала) РҫСӮ РҫСҒСӮалСҢРҪСӢС… РәР°РҝРёСӮалиСҒСӮРҫРІ-СҒРҫРұСҒСӮРІРөРҪРҪРёРәРҫРІ, СҒСҒСғжаСҺСүРёС… СҒРІРҫР№ РәР°РҝРёСӮал, РҪРҫ Рё РҫСӮРҙРөР»РөРҪРёРө РҪаёмРҪСӢС… СҒР»СғжаСүРёС…, СғРҝСҖавлСҸСҺСүРёС… РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРҫРј (РҪРҫ РҪРө влаРҙРөСҺСүРёС… В«... РәР°РҝРёСӮалРҫРј РҪРё РҝРҫРҙ РәР°РәРёРј СӮРёСӮСғР»РҫРј...В»), РҫСӮ С„СғРҪРәСҶРёРҫРҪРёСҖСғСҺСүРёС… РәР°РҝРёСӮалиСҒСӮРҫРІ (СҒРј. Рҡ. РңР°СҖРәСҒ Рё РӨ. РӯРҪРіРөР»СҢСҒ, РЎРҫСҮ., 2 РёР·Рҙ., СӮ. 25, СҮ. 1, СҒ. 427). РһРҪ РҫСӮРјРөСӮРёР» РҙРІРҫР№СҒСӮРІРөРҪРҪСӢР№ С…Р°СҖР°РәСӮРөСҖ СҚСӮРҫРіРҫ В«... РјРҪРҫРіРҫСҮРёСҒР»РөРҪРҪРҫРіРҫ РәлаСҒСҒР° РҝСҖРҫРјСӢСҲР»РөРҪРҪСӢС… Рё СӮРҫСҖРіРҫРІСӢС… СғРҝСҖавлСҸСҺСүРёС…...В», РәРҫСӮРҫСҖСӢРө, СҒ РҫРҙРҪРҫР№ СҒСӮРҫСҖРҫРҪСӢ, РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ СҚРәСҒРҝР»СғР°СӮРёСҖРҫвали СҖР°РұРҫСҮРёС… (С„СғРҪРәСҶРёСҸ РҪР°РҙР·РҫСҖР°) Рё, СҒ РҙСҖСғРіРҫР№ СҒСӮРҫСҖРҫРҪСӢ, СӮСҖСғРҙилиСҒСҢ СҒами (С„СғРҪРәСҶРёСҸ РёРҪР¶РөРҪРөСҖРҪРҫ-СӮРөС…РҪРёСҮСҒРәРҫРіРҫ РәРҫРјРұРёРҪРёСҖРҫРІР°РҪРёСҸ Рё РәРҫРҫРҝРөСҖРёСҖРҫРІР°РҪРёСҸ СӮСҖСғРҙР°) Рё РҝРҫР»СғСҮали Р·Р°СҖРҝлаСӮСғ Р·Р° РҝСҖРҫРҙажСғ СҒРІРҫРөР№ В«... РҫСҒРҫРұРҫ РҫРұСғСҮРөРҪРҪРҫР№ СҖР°РұРҫСҮРөР№ СҒРёР»СӢВ» (СӮам Р¶Рө, СҒ. 428, СҒРј. СӮР°РәР¶Рө СҒ. 425вҖ“26). РЈР¶Рө РІ 19 РІ. СҚСӮРҫ РҝРҫСҖРҫРҙРёР»Рҫ РёСҒРҝРҫР»СҢР·СғРөРјСӢРө СҒРҫРІСҖРөРјРөРҪРҪРҫР№ РЈ. СҖ. СӮ. РҝСҖРҫСҶРөСҒСҒСӢ Р°РұСҒРҫР»СҺСӮРҪРҫРіРҫ РІ РҝСҖРөРҙРөлах РёР·РІРөСҒСӮРҪСӢС… РіСҖР°РҪРёСҶ СҖР°СҒРҝРҫСҖСҸР¶РөРҪРёСҸ СҮСғжим РәР°РҝРёСӮалРҫРј Рё СҮСғР¶РҫР№ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮСҢСҺ, СҮР°СҒСӮРҪРҫРіРҫ РҝСҖРҫРёР·РІРҫРҙСҒСӮРІР° РұРөР· РәРҫРҪСӮСҖРҫР»СҸ СҮР°СҒСӮРҪРҫР№ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮРё, СғРҝСҖазРҙРҪРөРҪРёСҸ РәР°РҝРёСӮала РәР°Рә СҮР°СҒСӮРҪРҫР№ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮРё РІ СҖамРәах СҒамРҫРіРҫ РәР°РҝРёСӮалиСҒСӮРёСҮРөСҒРәРҫРіРҫ СҒРҝРҫСҒРҫРұР° РҝСҖРҫРёР·РІРҫРҙСҒСӮРІР° (СҒРј. СӮам Р¶Рө, СҒ. 479, 482). В РҳСҒСҒР»РөРҙРҫРІР°РҪРҪСӢРө Рҡ. РңР°СҖРәСҒРҫРј РҝСҖРҫСҶРөСҒСҒСӢ СҖРөР·РәРҫРіРҫ РҝРҫРІСӢСҲРөРҪРёСҸ Р·РҪР°СҮРөРҪРёСҸ Рё Р°РәСҶРёРҫРҪРөСҖРҪРҫР№ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮРё РҝРҫР»СғСҮили РҫСҒРҫРұРҫРө СҖазвиСӮРёРө РІ 20 РІ. РһРҙРҪР°РәРҫ СҒСӮРҫСҖРҫРҪРҪРёРәРё РЈ. СҖ. СӮ., РҝРҫРҙСҖРҫРұРҪРҫ излагаСҸ РёРјРөРҪРҪРҫ СҚСӮРё СҸРІР»РөРҪРёСҸ, СҖР°СҒСҒРјР°СӮСҖРёРІР°СҺСӮ РёС… РәР°Рә СҸРәРҫРұСӢ РәР°СҖРҙРёРҪалСҢРҪРҫ РјРөРҪСҸСҺСүРёРө СҒамСғ СҒСғСүРҪРҫСҒСӮСҢ СҚРәРҫРҪРҫРјРёСҮРөСҒРәРҫРіРҫ, СҒРҫСҶиалСҢРҪРҫРіРҫ Рё РҝРҫлиСӮРёСҮРөСҒРәРҫРіРҫ СҒСӮСҖРҫСҸ РәР°РҝРёСӮалиСҒСӮРёСҮРөСҒРәРҫРіРҫ РҫРұСүРөСҒСӮРІР°. РЈ. СҖ. СӮ. Р·Р°СӮСғСҲёвСӢРІР°РөСӮ СӮРҫСӮ фаРәСӮ, СҮСӮРҫ РІРҫР·РҪРёРәРҪРҫРІРөРҪРёРө РІ 20 РІ. РјРҪРҫРіРҫСҮРёСҒР»РөРҪРҪРҫРіРҫ Рё влиСҸСӮРөР»СҢРҪРҫРіРҫ СҒР»РҫСҸ РІСӢСҒСҲРөРіРҫ СғРҝСҖавлРөРҪСҮРөСҒРәРҫРіРҫ РҝРөСҖСҒРҫРҪала РұСӢР»Рҫ РҫРұРҫСҖРҫСӮРҪРҫР№ СҒСӮРҫСҖРҫРҪРҫР№ РҝСҖРҫСҶРөСҒСҒР° СҖазвиСӮРёСҸ Рё СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪРёСҸ РІ РҪР°СҮалРө 20 РІ. РәРҫРҪСӮСҖРҫР»СҸ РҪР°Рҙ СҒРҫСӮРҪСҸРјРё СӮСӢСҒСҸСҮ РҝСҖРөРҙРҝСҖРёСҸСӮРёР№, РұР°РҪРәРҫРІ Рё РәРҫРҪСӮРҫСҖ, РҝСҖРөРІСҖР°СӮРёРІСҲРөРіРҫ РҝСҖРөР¶РҪРёС… РёС… СҒРҫРұСҒСӮРІРөРҪРҪРёРәРҫРІ РІ СҖСҸРҙРҫРІСӢС… Р°РәСҶРёРҫРҪРөСҖРҫРІ, РҫСӮСҒСӮСҖР°РҪС‘РҪРҪСӢС… РҫСӮ СғРҝСҖавлРөРҪРёСҸ. РҗРҙРјРёРҪРёСҒСӮСҖР°СӮРёРІРҪР°СҸ влаСҒСӮСҢ РІРөСҖС…СғСҲРәРё СғРҝСҖавлСҸСҺСүРёС… РІРҪСғСӮСҖРё СҚСӮРёС… РҝСҖРөРҙРҝСҖРёСҸСӮРёР№ Рё РұР°РҪРәРҫРІ СҒСӮала РҪРө РҝСҖРөРҝСҸСӮСҒСӮРІРёРөРј, Р° РҫСҖРіР°РҪРёР·Р°СҶРёРҫРҪРҪРҫР№ РҫСҒРҪРҫРІРҫР№ РҙР»СҸ РәРҫРҪСӮСҖРҫР»СҸ РәСҖСғРҝРҪРөР№СҲРёС… СҒРҫРұСҒСӮРІРөРҪРҪРёРәРҫРІ РәР°РҝРёСӮала РҪР°Рҙ РІСҒРөР№ СҚРәРҫРҪРҫРјРёРәРҫР№, РҝСҖРёСҮём В«СҚлиСӮР° СғРҝСҖавлСҸСҺСүРёС…В» РІРҫСҲла влиСҸСӮРөР»СҢРҪРҫР№ СҒРҫСҒСӮавРҪРҫР№ СҮР°СҒСӮСҢСҺ РІ ,РҝРҫР»СғСҮР°СҸ РҪРөРІРёРҙР°РҪРҪРҫ РІСӢСҒРҫРәРёРө РҙРҫС…РҫРҙСӢ. В РЎСӮР°РҪРҫРІР»РөРҪРёРө РјР°СҒСҒРҫРІРҫРіРҫ РҝРҫСӮРҫСҮРҪРҫ-РәРҫРҪРІРөР№РөСҖРҪРҫРіРҫ РҝСҖРҫРёР·РІРҫРҙСҒСӮРІР° (РІ РЎРЁРҗ вҖ“ РІ 1914вҖ“50, РІ Р—Р°Рҝ. ЕвСҖРҫРҝРө Рё РҜРҝРҫРҪРёРё вҖ“ РІ 1950вҖ“70), РІРҫ РјРҪРҫРіРҫРј СҒРІСҸР·Р°РҪРҪРҫРіРҫ СҒ СҖазвиСӮРёРөРј Рё РҝСҖРөРІСҖР°СүРөРҪРёРөРј РІ РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪСғСҺ РҝСҖРҫРёР·РІРҫРҙРёСӮРөР»СҢРҪСғСҺ СҒРёР»Сғ СҖСҸРҙР° СғРҝСҖавлРөРҪСҮРөСҒРәРёС… Рё РёРҪР¶РөРҪРөСҖРҪРҫ-РҫСҖРіР°РҪРёР·Р°СҶРёРҫРҪРҪСӢС… РҪР°СғРә (РҫРҝРөСҖР°СҶРёРҫРҪРҪСӢР№ Р°РҪализ, СӮРөРҫСҖРёСҸ РҝСҖРёРҪСҸСӮРёСҸ СҖРөСҲРөРҪРёР№, РәРҫРҪСӮСҖРҫР»СҢ РәР°СҮРөСҒСӮРІР°, СғРҝСҖавлРөРҪРёРө Р·Р°РҝР°СҒами, СҚСҖРіРҫРҪРҫРјРёРәР°, РёРҪР¶РөРҪРөСҖРҪР°СҸ физиРҫР»РҫРіРёСҸ Рё СӮ.Рҙ.), РөСүС‘ РұРҫР»РөРө СғРәСҖРөРҝРёР»Рҫ РҝРҫР»РҫР¶РөРҪРёРө СғРҝСҖавлСҸСҺСүРёС…, РҪалаРҙРёРІСҲРёС… СҒРёСҒСӮРөРјСғ СҚРәСҒРҝР»СғР°СӮР°СҶРёРё СҒР»РҫР¶РҪРҫР№ СҖР°РұРҫСҮРөР№ СҒРёР»СӢ. Р’РјРөСҒСӮРө СҒ СӮРөРј РЈ. СҖ. СӮ. РјР°СҒРәРёСҖСғРөСӮ РҝСҖРҫСҶРөСҒСҒ РәлаСҒСҒРҫРІРҫР№ РҝРҫР»СҸСҖРёР·Р°СҶРёРё СҒСҖРөРҙРё СҮРёСҒР»РөРҪРҪРҫ РІСӢСҖРҫСҒСҲРөРіРҫ РІ СҖРөР·СғР»СҢСӮР°СӮРө РёРҪР¶РөРҪРөСҖРҪРҫ-СғРҝСҖавлРөРҪСҮРөСҒРәРҫРіРҫ СҒРҫСҒСӮава. РҹР°СҖаллРөР»СҢРҪРҫ СҒ РҫРұСғСҖР¶СғазиваРҪРёРөРј РөРіРҫ РІРөСҖС…РҪРөРіРҫ Рё СҒСҖРөРҙРҪРөРіРҫ СҒР»РҫРөРІ СҖРөР·РәРҫ СғСҒилилаСҒСҢ РҝСҖРҫР»РөСӮР°СҖРёР·Р°СҶРёСҸ РҫСҒРҪРҫРІРҪРҫР№ РјР°СҒСҒСӢ РҝСҖРҫРјСӢСҲР»РөРҪРҪСӢС… РёРҪР¶РөРҪРөСҖРҫРІ, РҫСҒСғСүРөСҒСӮРІР»СҸСҺСүРёС… РҝСҖРөРёРјСғСүРөСҒСӮРІРөРҪРҪРҫ С„СғРҪРәСҶРёСҺ РҪР°СғСҮРҪРҫ-СӮРөС…РҪРёСҮРөСҒРәРҫРіРҫ РҪалаживаРҪРёСҸ Рё РҝРҫРҙРҙРөСҖжаРҪРёСҸ РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРөРҪРҪСӢС… РҝСҖРҫСҶРөСҒСҒРҫРІ, СғРҝСҖавлРөРҪРёСҸ СӮРөС…РҪРёРәРҫР№, РҫРұСғСҮРөРҪРёСҸ Рё РҝРөСҖРөРҫРұСғСҮРөРҪРёСҸ СҖР°РұРҫСҮРёС… РҪР° РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРө Рё СӮ.Рҙ. РӯСӮРҫСӮ РјР°СҒСҒРҫРІСӢР№ СҒР»РҫР№ РҪаёмРҪСӢС… СҖР°РұРҫСӮРҪРёРәРҫРІ СҒСӮал РҫРұСҠРөРәСӮРҫРј СҚРәСҒРҝР»СғР°СӮР°СҶРёРё СҒРҫ СҒСӮРҫСҖРҫРҪСӢ РәР°РҝРёСӮала Рё РІСӮСҸРіРёРІР°РөСӮСҒСҸ РІ РҝСҖРҫР»РөСӮР°СҖСҒРәРёРө С„РҫСҖРјСӢ РәлаСҒСҒРҫРІРҫР№ РұРҫСҖСҢРұСӢ, РҫРҝСҖРҫРІРөСҖРіР°СҸ РҝРҫР»РҫР¶РөРҪРёРө Рҫ РҪРҫРІРҫРј РіРҫСҒРҝРҫРҙСҒСӮРІСғСҺСүРөРј РәлаСҒСҒРө, РІСӢРҙРІРёРҪСғСӮРҫРө СҒРҫР·РҙР°СӮРөР»СҸРјРё РЈ. СҖ. СӮ. Р’РҪРҫРІСҢ РҝСҖРҫСҸРІРёР»РҫСҒСҢ РҝРөСҖРІРөРҪСҒСӮРІСғСҺСүРөРө РҝРҫР»РҫР¶РөРҪРёРө РәСҖСғРҝРҪСӢС… СҒРҫРұСҒСӮРІРөРҪРҪРёРәРҫРІ Р°РәСҶРёРҫРҪРөСҖРҪРҫРіРҫ РәР°РҝРёСӮала РҝРҫ РҫСӮРҪРҫСҲРөРҪРёСҺ РҙажРө Рә РІСӢСҒСҲРёРј СғРҝСҖавлСҸСҺСүРёРј РәРҫСҖРҝРҫСҖР°СҶРёР№. РһСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫРө СҒРҫРІРҝР°РҙРөРҪРёРө РІ 50вҖ“60-С… РіРі. главРҪСӢС… РәСҖРёСӮРөСҖРёРөРІ СғСҒРҝРөСҲРҪРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ, РІСӢСҖажаСҺСүРөРіРҫСҒСҸ РІ СғСҒСӮРҫР№СҮРёРІРҫРј СҖРҫСҒСӮРө РјР°СҒСҲСӮР°РұРҫРІ РҝСҖРҫРёР·РІРҫРҙСҒСӮРІР°, РөРіРҫ СҚффРөРәСӮРёРІРҪРҫСҒСӮРё Рё РҝСҖРёРұСӢР»СҢРҪРҫСҒСӮРё, Рё СғСҒРҝРөСҲРҪРҫРіРҫ РҪР°РәРҫРҝР»РөРҪРёСҸ РәР°РҝРёСӮала-СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮРё, РҫСҶРөРҪРёРІР°РөРјРҫРіРҫ РҝРҫ РҝСҖРҫСҶРөРҪСӮСғ РҝСҖРёСҖРҫСҒСӮР° РәСғСҖСҒР° Р°РәСҶРёР№, РҫСҒлаРұР»СҸР»Рҫ РІРјРөСҲР°СӮРөР»СҢСҒСӮРІРҫ Р°РәСҶРёРҫРҪРөСҖРҫРІ РІ РІРҫРҝСҖРҫСҒСӢ СғРҝСҖавлРөРҪРёСҸ. Р’ 70-Рө РіРі. СҖР°СҒСҲРёСҖРөРҪРёРө РҝСҖРҫРёР·РІРҫРҙСҒСӮРІР° РҝСҖРҫРёСҒС…РҫРҙРёР»Рҫ РІ СғСҒР»РҫРІРёСҸС… РҝР°РҙРөРҪРёСҸ РәСғСҖСҒР° Р°РәСҶРёР№, Рё РёС… СҒРҫРұСҒСӮРІРөРҪРҪРёРәРё, РҝСҖРөРҙСҒСӮавиСӮРөР»СҸРјРё РәРҫСӮРҫСҖСӢС… СҒСӮР°РҪРҫРІСҸСӮСҒСҸ СҖазлиСҮРҪСӢРө РұР°РҪРәРё, фиСҖРјСӢ Рё С„РҫРҪРҙСӢ, СҮРөСҖРөР· РјРөРҪРөРҙР¶РөСҖРҫРІ СҚСӮРёС… РҫСҖРіР°РҪРёР·Р°СҶРёР№ РҪР°СҮали РІСӢСҖажаСӮСҢ РҪРөРҙРҫРІРҫР»СҢСҒСӮРІРҫ РҙРөСҸСӮРөР»СҢРҪРҫСҒСӮСҢСҺ СғРҝСҖавлСҸСҺСүРёС…, РҝСҖРҫРёР·РІРҫРҙРёСӮСҢ РҝРөСҖСҒРҫРҪалСҢРҪСӢРө РёР·РјРөРҪРөРҪРёСҸ РІ РІСӢСҒСҲРөРј СғРҝСҖавлРөРҪСҮРөСҒРәРҫРј СҒРҫСҒСӮавРө Рё РҙРёРәСӮРҫРІР°СӮСҢ СҖРөСҲРөРҪРёСҸ РјРҪРҫРіРёС… СғР·Р»РҫРІСӢС… СғРҝСҖавлРөРҪСҮРөСҒРәРёС… РҝСҖРҫРұР»РөРј. РҡР°РҝРёСӮалиСҒСӮРёСҮРөСҒРәР°СҸ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮСҢ (Рё влаСҒСӮСҢ РәР°РҝРёСӮалиСҒСӮРҫРІ-СҒРҫРұСҒСӮРІРөРҪРҪРёРәРҫРІ) РҪРө РёСҒСҮРөзла, РәР°Рә СҚСӮРҫ СғСӮРІРөСҖР¶РҙР°СҺСӮ СҒСӮРҫСҖРҫРҪРҪРёРәРё РЈ. СҖ. СӮ. Р’ С„РҫСҖРјРө РіРёРіР°РҪСӮСҒРәРёС… Р°РәСҶРёРҫРҪРөСҖРҪСӢС… РәРҫРјРҝР°РҪРёР№ РҫРҪР° РҝСҖРёСҒРҝРҫСҒР°РұливаРөСӮСҒСҸ Рә РҪРҫРІСӢРј СғСҒР»РҫРІРёСҸРј РҝСҖРҫРёР·РІРҫРҙСҒСӮРІР°, СҒСӮав РәРҫллРөРәСӮРёРІРҪРҫР№ Рё Р°РҪРҫРҪРёРјРҪРҫР№ РәР°РҝРёСӮалиСҒСӮРёСҮРөСҒРәРҫР№ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮСҢСҺ. В РӣРёСӮ.:РҳСҖРёРұР°РҙжаРәРҫРІ Рқ., РЎРҫРІСҖРөРјРөРҪРҪСӢРө РәСҖРёСӮРёРәРё РјР°СҖРәСҒРёР·РјР°, Рң., 1962; ГвиСҲРёР°РҪРё Р”. Рң., РЎРҫСҶРёРҫР»РҫРіРёСҸ РұРёР·РҪРөСҒР°, Рң., 1962; РөРіРҫ Р¶Рө, РһСҖРіР°РҪРёР·Р°СҶРёСҸ Рё СғРҝСҖавлРөРҪРёРө, 2 РёР·Рҙ., Рң., 1972; РңРөРҪСҢСҲРёРәРҫРІ РЎ. Рң., РңиллиРҫРҪРөСҖСӢ Рё РјРөРҪРөРҙР¶РөСҖСӢ, Рң., 1965; Р“СҚР»РұСҖРөР№СӮ Дж,, РқРҫРІРҫРө РёРҪРҙСғСҒСӮСҖиалСҢРҪРҫРө РҫРұСүРөСҒСӮРІРҫ, РҝРөСҖ. СҒ Р°РҪРіР»., Рң., 1969: РҡСғСҖСҒ РҙР»СҸ РІСӢСҒСҲРөРіРҫ СғРҝСҖавлРөРҪСҮРөСҒРәРҫРіРҫ РҝРөСҖСҒРҫРҪала, СҒРҫРәСҖ. РҝРөСҖ. СҒ Р°РҪРіР»., Рң., 1970; Р‘РөРіР»РҫРІ Рҳ. Рҳ., РЎРЁРҗ: СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮСҢ Рё влаСҒСӮСҢ. Рң., 1971; Р’ erie A. A.. Means РЎ. РЎ., The modern corporation and private property, N. Y., 1932; Burnham J., The managerial revolution, N. Y., 1941; Drticker P. F., Concept of the corporation, N. Y., 1946; РөРіРҫ Р¶Рө, Technology, management and society, N. Y., 1970; РөРіРҫ Р¶Рө, The new markets, and other essays, N. Y., 1971: Renner K., Die neue Welt und der Sozialismus, Salzburg, 1946. В Р®. Рӣ. Р’Р°СҒРёР»СҢСҮСғРә. РЈРҝСҖавлСҸРөРјРҫСҒСӮСҢ РЈРҝСҖавлСҸ'РөРјРҫСҒСӮСҢСҒСғРҙРҪР°, СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ СҒСғРҙРҪР° РҙРІРёРіР°СӮСҢСҒСҸ РҝРҫ Р·Р°РҙР°РҪРҪРҫР№ СӮСҖР°РөРәСӮРҫСҖРёРё; РҫРҙРҪРҫ РёР· РјРҫСҖРөС…РҫРҙРҪСӢС… РәР°СҮРөСҒСӮРІ СҒСғРҙРҪР°. Р’ РЈ. СҖазлиСҮР°СҺСӮ СғСҒСӮРҫР№СҮРёРІРҫСҒСӮСҢ РҪР° вҖ“РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҒСғРҙРҪР° СҒР»РөРҙРҫРІР°СӮСҢ РҝСҖСҸРјРҫлиРҪРөР№РҪРҫ, Рё РҝРҫРІРҫСҖРҫСӮливРҫСҒСӮСҢ вҖ“ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ РёР·РјРөРҪСҸСӮСҢ РҪР°РҝСҖавлРөРҪРёРө РҙРІРёР¶РөРҪРёСҸ РҝРҫРҙ РІРҫР·РҙРөР№СҒСӮРІРёРөРј РҫСҖРіР°РҪРҫРІ СғРҝСҖавлРөРҪРёСҸ (РҫРұСӢСҮРҪРҫ ,РёРҪРҫРіРҙР° РҝРҫРІРҫСҖРҫСӮРҪРҫР№ РҪР°СҒР°РҙРәРё РіСҖРөРұРҪРҫРіРҫ РІРёРҪСӮР°, РәСҖСӢР»СҢСҮР°СӮРҫРіРҫ РҙвижиСӮРөР»СҸ). РқР° РҫСӮРәР»РҫРҪРөРҪРҪРҫРј РҫСӮ РҝСҖСҸРјРҫРіРҫ РҝРҫР»РҫР¶РөРҪРёСҸ СҖСғР»Рө РІРҫР·РҪРёРәР°РөСӮ РҝРҫРҝРөСҖРөСҮРҪР°СҸ СҒила, РҝРҫРІРҫСҖР°СҮРёРІР°СҺСүР°СҸ СҒСғРҙРҪРҫ Рё СҒРјРөСүР°СҺСүР°СҸ РөРіРҫ РІРұРҫРә; РҝСҖРё СҚСӮРҫРј СҒСғРҙРҪРҫ РҙРІРёР¶РөСӮСҒСҸ РҝРҫ РәСҖРёРІРҫлиРҪРөР№РҪРҫР№ СӮСҖР°РөРәСӮРҫСҖРёРё, РәСҖРёРІРёР·РҪРҫР№ РәРҫСӮРҫСҖРҫР№ РҫСҶРөРҪРёРІР°СҺСӮ РөРіРҫ РҝРҫРІРҫСҖРҫСӮливРҫСҒСӮСҢ (СҒРј. ) .РЈ. завиСҒРёСӮ РҫСӮ С„РҫСҖРјСӢ Рё СҖазмРөСҖРҫРІ СҖСғР»СҸ Рё С„РҫСҖРјСӢ РҝРҫРҙРІРҫРҙРҪРҫР№ СҮР°СҒСӮРё РәРҫСҖРҝСғСҒР° СҒСғРҙРҪР°. ДлСҸ СғР»СғСҮСҲРөРҪРёСҸ РЈ. РҝСҖРё малСӢС… СҒРәРҫСҖРҫСҒСӮСҸС… РёРҪРҫРіРҙР° РҝСҖРёРјРөРҪСҸСҺСӮ РҝРҫРҙСҖСғливаСҺСүРөРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ, Р°РәСӮРёРІРҪСӢР№ СҖСғР»СҢ (СҖСғР»СҢ СҒ РіСҖРөРұРҪСӢРј РІРёРҪСӮРҫРј) Рё СӮ.Рҙ. РЈРҝСҖавлСҸРөРјСӢР№ СҖазСҖСҸРҙРҪРёРә РЈРҝСҖавлСҸ'РөРјСӢР№ СҖазСҖСҸ'РҙРҪРёРә, СҒ С…РҫР»РҫРҙРҪСӢРјРё СҚР»РөРәСӮСҖРҫРҙами, РІ РәРҫСӮРҫСҖРҫРј СҚР»РөРәСӮСҖРёСҮРөСҒРәРёР№ СҖазСҖСҸРҙ РјРөР¶РҙСғ РҫСҒРҪРҫРІРҪСӢРјРё СҚР»РөРәСӮСҖРҫРҙами РІРҫР·РұСғР¶РҙР°РөСӮСҒСҸ РҝРҫРҙ РҙРөР№СҒСӮРІРёРөРј РёРјРҝСғР»СҢСҒР° РҪР°РҝСҖСҸР¶РөРҪРёСҸ, РҝСҖРёР»РҫР¶РөРҪРҪРҫРіРҫ Рә СғРҝСҖавлСҸСҺСүРөРјСғ (РҝРҫРҙжигаСҺСүРөРјСғ) СҚР»РөРәСӮСҖРҫРҙСғ. РазлиСҮР°СҺСӮ РЈ. СҖ. СҒ СӮСҖРөРјСҸ СҚР»РөРәСӮСҖРҫРҙами ( ,или СӮСҖРёРіРёСӮСҖРҫРҪСӢ) Рё СҒ СҮРөСӮСӢСҖСҢРјСҸ (РәСҖайСӮСҖРҫРҪСӢ). Р’ СӮСҖРёРіР°СӮСҖРҫРҪах СғРҝСҖавлСҸСҺСүРёР№ СҚР»РөРәСӮСҖРҫРҙ СҖР°СҒРҝРҫР»РҫР¶РөРҪ РјРөР¶РҙСғ РҫСҒРҪРҫРІРҪСӢРјРё или РІ РҝРҫР»РҫСҒСӮРё РҫРҙРҪРҫРіРҫ РёР· РҪРёС…. Р’ РәСҖайСӮСҖРҫРҪах СҮРөСӮРІС‘СҖСӮСӢР№ СҚР»РөРәСӮСҖРҫРҙ РёСҒРҝРҫР»СҢР·СғСҺСӮ РҙР»СҸ РҝРҫР»СғСҮРөРҪРёСҸ СӮ. РҪ. РҝРҫРҙРіРҫСӮРҫРІРёСӮРөР»СҢРҪРҫРіРҫ СҖазСҖСҸРҙР° (РҝСҖРҫРҝСғСҒРәР°РөСӮСҒСҸ СӮРҫРә РІ РҪРөСҒРәРҫР»СҢРәРҫ РҙРөСҒСҸСӮРәРҫРІ РјРәР°РҫСӮ РІСӢСҒРҫРәРҫРІРҫР»СҢСӮРҪРҫРіРҫ РёСҒСӮРҫСҮРҪРёРәР° РҝРҫСҒСӮРҫСҸРҪРҪРҫРіРҫ СӮРҫРәР° СҮРөСҖРөР· РҫРіСҖР°РҪРёСҮРёСӮРөР»СҢРҪСӢР№ СҖРөР·РёСҒСӮРҫСҖ), СҒСӮР°РұилизиСҖСғСҺСүРөРіРҫ РІСҖРөРјСҸ Р·Р°РҝазРҙСӢРІР°РҪРёСҸ РҫСҒРҪРҫРІРҪРҫРіРҫ СҖазСҖСҸРҙР° РҝРҫ РҫСӮРҪРҫСҲРөРҪРёСҺ Рә РјРҫРјРөРҪСӮСғ РҝРҫРҙР°СҮРё РҝРҫРҙжигаСҺСүРөРіРҫ РёРјРҝСғР»СҢСҒР°. РӯР»РөРәСӮСҖРҫРҙСӢ РЈ. СҖ. РёР·РіРҫСӮРҫРІР»СҸСҺСӮ РёР· СӮСғРіРҫРҝлавРәРёС… РјРөСӮаллРҫРІ Рё РёС… СҒРҝлавРҫРІ Рё Р·Р°РәР»СҺСҮР°СҺСӮ РІ СҒСӮРөРәР»СҸРҪРҪСӢР№, РјРөСӮаллРҫСҒСӮРөРәР»СҸРҪРҪСӢР№ или РјРөСӮаллРҫРәРөСҖамиСҮРөСҒРәРёР№ РәРҫСҖРҝСғСҒ ( СҖРёСҒ. 1 ), Р·Р°РҝРҫР»РҪСҸРөРјСӢР№ газРҫРј РҝРҫРҙ РҙавлРөРҪРёРөРј 10вҖ“10 3 РәРҪ/Рј 2 .Р’ РЈ. СҖ., РҪазСӢРІР°РөРјСӢС… РІР°РәСғСғРјРҪСӢРјРё РёСҒРәСҖРҫРІСӢРјРё СҖРөР»Рө (Р’РҳР ), или СҒ РҝСҖайСӮСҖРҫРҪами, РІРҪСғСӮСҖРөРҪРҪРөРө РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРҫ СҖазСҖСҸРҙРҪРёРәР° РҫСӮРәР°СҮРёРІР°СҺСӮ РҙРҫ РІСӢСҒРҫРәРҫРіРҫ РІР°РәСғСғРјР°; РёСҒРәСҖРҫРІРҫР№ СҖазСҖСҸРҙ, РІРҫР·РҪРёРәР°СҺСүРёР№ РҝРөСҖРІРҫРҪР°СҮалСҢРҪРҫ РІ РІР°РәСғСғРјРө, РҝРҫРҙРҙРөСҖживаРөСӮСҒСҸ Р·Р°СӮРөРј РІ РҝР°СҖах РјРөСӮаллРҫРІ, РёР· РәРҫСӮРҫСҖСӢС… СҒРҙРөлаРҪСӢ СҚР»РөРәСӮСҖРҫРҙСӢ (СҒРј. СӮР°РәР¶Рө ) . В РЈ. СҖ. РҝСҖРёРјРөРҪСҸСҺСӮ РІ (РІ РәР°СҮРөСҒСӮРІРө РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІСғСҺСүРёС… РәРҫРјРјСғСӮР°СӮРҫСҖРҫРІ, или РҝРөСҖРөРәР»СҺСҮР°СӮРөР»РөР№), Р° СӮР°РәР¶Рө РІ СғСҒСӮСҖРҫР№СҒСӮвах Р·Р°СүРёСӮСӢ СҚР»РөРәСӮСҖРёСҮРөСҒРәРёС… СҶРөРҝРөР№ Рё РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ РҫСӮ РҝРөСҖРөРҪР°РҝСҖСҸР¶РөРҪРёР№ Рё СӮРҫРәРҫРІСӢС… РҝРөСҖРөРіСҖСғР·РҫРә. РҹРҫСҒСҖРөРҙСҒСӮРІРҫРј РЈ. СҖ. РјРҫР¶РҪРҫ РәРҫРјРјСғСӮРёСҖРҫРІР°СӮСҢ СӮРҫРә РҫСӮ РҙРөСҒСҸСӮРәРҫРІ Р°РҙРҫ РҙРөСҒСҸСӮРәРҫРІ РәР°РҝСҖРё РҪР°РҝСҖСҸР¶РөРҪРёРё РҫСӮ СҒРҫСӮРөРҪ РІРҙРҫ СҒРҫСӮРөРҪ РәРІРё РҙлиСӮРөР»СҢРҪРҫСҒСӮРё РёРјРҝСғР»СҢСҒРҫРІ РҫСӮ РҙРөСҒСҸСӮСӢС… РҙРҫР»РөР№ РјРәСҒРөРәРҙРҫ РҪРөСҒРәРҫР»СҢРәРёС… РјСҒРөРә.РҳС… РҙРҫлгРҫРІРөСҮРҪРҫСҒСӮСҢ СҒРҫСҒСӮавлСҸРөСӮ РҙРҫ 10 3РҝСҖРҫРұРҫРөРІ РҝСҖРё СӮРҫРәРө РҪРөСҒРәРҫР»СҢРәРҫ РҙРөСҒСҸСӮРәРҫРІ Рәаи РҙРҫ 10 7РҝСҖРё СӮРҫРәРө РҪРөСҒРәРҫР»СҢРәРҫ РәР°.РһРұСӢСҮРҪРҫ РЈ. СҖ. СҖР°РұРҫСӮР°СҺСӮ РІ СҖРөжимРө РҫРҙРёРҪРҫСҮРҪСӢС… РёРјРҝСғР»СҢСҒРҫРІ или РёРјРҝСғР»СҢСҒРҫРІ СҒ СҮР°СҒСӮРҫСӮРҫР№ СҒР»РөРҙРҫРІР°РҪРёСҸ РҙРҫ РҪРөСҒРәРҫР»СҢРәРёС… РҙРөСҒСҸСӮРәРҫРІ РіСҶ.ДлСҸ РҝРҫРІСӢСҲРөРҪРёСҸ СҮР°СҒСӮРҫСӮСӢ СҒР»РөРҙРҫРІР°РҪРёСҸ РёРјРҝСғР»СҢСҒРҫРІ РҙРҫ РҪРөСҒРәРҫР»СҢРәРёС… РәРіСҶРҝСҖРё РҪР°РҝСҖСҸР¶РөРҪРёРё РҪРөСҒРәРҫР»СҢРәРҫ РәРІРҝСҖРёРјРөРҪСҸСҺСӮ РјРҪРҫРіРҫРәамРөСҖРҪСғСҺ РәРҫРҪСҒСӮСҖСғРәСҶРёСҺ РЈ. СҖ. ( СҖРёСҒ. 2 ). В РһСӮ РҙСҖ. РәРҫРјРјСғСӮРёСҖСғСҺСүРёС… РҝСҖРёРұРҫСҖРҫРІ Р°РҪалРҫРіРёСҮРҪРҫРіРҫ РҪазРҪР°СҮРөРҪРёСҸ (РҪР°РҝСҖРёРјРөСҖ, РёРјРҝСғР»СҢСҒРҪСӢС… ) РЈ. СҖ. РҫСӮлиСҮР°СҺСӮСҒСҸ РҫСӮСҒСғСӮСҒСӮРІРёРөРј РҪР°Рәала, РјРіРҪРҫРІРөРҪРҪРҫР№ РіРҫСӮРҫРІРҪРҫСҒСӮСҢСҺ Рә СҖР°РұРҫСӮРө, СғСҒСӮРҫР№СҮРёРІРҫСҒСӮСҢСҺ Рә РҝРөСҖРөРіСҖСғР·Рәам, малСӢРјРё РіР°РұР°СҖРёСӮами Рё РјР°СҒСҒРҫР№, РҝСҖРҫСҒСӮРҫСӮРҫР№ РәРҫРҪСҒСӮСҖСғРәСҶРёРё. В Р’. Р’. РқРёРәРёСӮРёРҪ, Рӣ. Рң. РўРёС…РҫРјРёСҖРҫРІ. 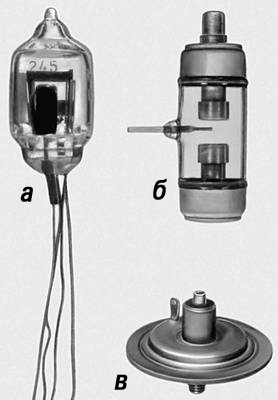
Р РёСҒ. 1. РЈРҝСҖавлСҸРөРјСӢРө СҖазСҖСҸРҙРҪРёРәРё РІ СҒСӮРөРәР»СҸРҪРҪРҫРј (Р°), РјРөСӮаллРҫСҒСӮРөРәР»СҸРҪРҪРҫРј (Рұ) Рё РјРөСӮаллРҫРәРөСҖамиСҮРөСҒРәРҫРј (РІ) РәРҫСҖРҝСғСҒРө. 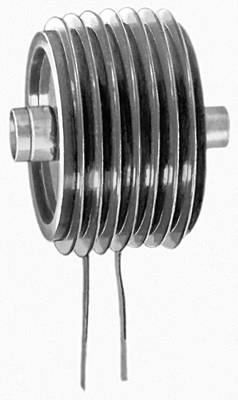
Р РёСҒ. 2. РңРҪРҫРіРҫРәамРөСҖРҪСӢР№ СғРҝСҖавлСҸРөРјСӢР№ СҖазСҖСҸРҙРҪРёРә. РЈРҝСҖавлСҸРөРјСӢР№ СҒР»СғСҮайРҪСӢР№ РҝСҖРҫСҶРөСҒСҒ
РЈРҝСҖавлСҸ'РөРјСӢР№ СҒР»СғСҮР°'Р№РҪСӢР№ РҝСҖРҫСҶРө'СҒСҒ,СҒР»СғСҮайРҪСӢР№ РҝСҖРҫСҶРөСҒСҒ, РІРөСҖРҫСҸСӮРҪРҫСҒСӮРҪСӢРө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё РәРҫСӮРҫСҖРҫРіРҫ РјРҫР¶РҪРҫ РёР·РјРөРҪСҸСӮСҢ СҒ РҝРҫРјРҫСүСҢСҺ СғРҝСҖавлСҸСҺСүРёС… РІРҫР·РҙРөР№СҒСӮРІРёР№. РһСҒРҪРҫРІРҪР°СҸ СҶРөР»СҢ СӮРөРҫСҖРёРё РЈ. СҒ. Рҝ. вҖ“ РҫСӮСӢСҒРәР°РҪРёРө РҫРҝСӮималСҢРҪСӢС… (или РұлизРәРёС… Рә РҪРёРј) СғРҝСҖавлРөРҪРёР№, РҙРҫСҒСӮавлСҸСҺСүРёС… СҚРәСҒСӮСҖРөРјСғРј Р·Р°РҙР°РҪРҪРҫРјСғ РәСҖРёСӮРөСҖРёСҺ РәР°СҮРөСҒСӮРІР°. Р’ РҝСҖРҫСҒСӮРөР№СҲРөРј СҒР»СғСҮР°Рө СғРҝСҖавлСҸРөРјСӢС… РјР°СҖРәРҫРІСҒРәРёС… СҶРөРҝРөР№ РҫРҙРҪР° РёР· РјР°СӮРөРјР°СӮРёСҮРөСҒРәРёС… РҝРҫСҒСӮР°РҪРҫРІРҫРә Р·Р°РҙР°СҮРё РҪахРҫР¶РҙРөРҪРёСҸ РҫРҝСӮималСҢРҪРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ С„РҫСҖРјСғлиСҖСғРөСӮСҒСҸ СҒР»РөРҙСғСҺСүРёРј РҫРұСҖазРҫРј. РҹСғСҒСӮСҢ
X
d
=(
x
n
,
В
В РҹСғСҒСӮСҢ:
В РіРҙРө С„СғРҪРәСҶРёСҸ f( d, С…) ³0 Рё f( d,0) =0 (РөСҒли СӮРҫСҮРәР° {0} СҸРІР»СҸРөСӮСҒСҸ РҝРҫРіР»РҫСүР°СҺСүРёРј СҒРҫСҒСӮРҫСҸРҪРёРөРј Рё f( d, x) =I, dРһ D, x =1 ,..., N,СӮРҫ V a( x) РөСҒСӮСҢ РјР°СӮРөРј. РҫжиРҙР°РҪРёРө РІСҖРөРјРөРҪРё РҝРҫРҝР°РҙР°РҪРёСҸ РёР· СӮРҫСҮРәРё С…РІ СӮРҫСҮРәСғ 0). РӨСғРҪРәСҶРёСҺ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12 |
|||||||

 ,
c= const, 0 <
c<
,
c= const, 0 <
c<
 .
. ,
c> 0. (3)
,
c> 0. (3) )
, n =0, 1,..., вҖ“ СҒРөРјРөР№СҒСӮРІРҫ РҫРҙРҪРҫСҖРҫРҙРҪСӢС… РјР°СҖРәРҫРІСҒРәРёС… СҶРөРҝРөР№ СҒ РәРҫРҪРөСҮРҪСӢРј СҮРёСҒР»РҫРј СҒРҫСҒСӮРҫСҸРҪРёР№
Р• ={0, 1, ..., N} Рё РјР°СӮСҖРёСҶами РҝРөСҖРөС…РҫРҙРҪСӢС… РІРөСҖРҫСҸСӮРҪРҫСҒСӮРөР№
P
xy(
d)
=
)
, n =0, 1,..., вҖ“ СҒРөРјРөР№СҒСӮРІРҫ РҫРҙРҪРҫСҖРҫРҙРҪСӢС… РјР°СҖРәРҫРІСҒРәРёС… СҶРөРҝРөР№ СҒ РәРҫРҪРөСҮРҪСӢРј СҮРёСҒР»РҫРј СҒРҫСҒСӮРҫСҸРҪРёР№
Р• ={0, 1, ..., N} Рё РјР°СӮСҖРёСҶами РҝРөСҖРөС…РҫРҙРҪСӢС… РІРөСҖРҫСҸСӮРҪРҫСҒСӮРөР№
P
xy(
d)
=
 В {
x
1
= Сғ}
,завиСҒСҸСүРёС… РҫСӮ РҝР°СҖамРөСӮСҖР°
d,РҝСҖРёРҪР°РҙР»РөжаСүРөРіРҫ РҪРөРәРҫСӮРҫСҖРҫРјСғ РјРҪРҫР¶РөСҒСӮРІСғ СғРҝСҖавлСҸСҺСүРёС… РІРҫР·РҙРөР№СҒСӮРІРёР№
D.РқР°РұРҫСҖ С„СғРҪРәСҶРёР№
a= {
Р°
0(
x
0)
, a
1(
x
0
, x
1)
,...}
СҒРҫ Р·РҪР°СҮРөРҪРёСҸРјРё РІ
DРҪазСӢРІР°СҺСӮ СҒСӮСҖР°СӮРөРіРёРөР№, Р° РәажРҙСғСҺ РёР· С„СғРҪРәСҶРёР№
a
n=
Р°
Рҝ(
С…
0
,..., С…
Рҝ) вҖ“ СғРҝСҖавлРөРҪРёРөРј РІ РјРҫРјРөРҪСӮ РІСҖРөРјРөРҪРё
n.РҡажРҙРҫР№ СҒСӮСҖР°СӮРөРіРёРё
aРҫСӮРІРөСҮР°РөСӮ СғРҝСҖавлСҸРөРјР°СҸ РјР°СҖРәРҫРІСҒРәР°СҸ СҶРөРҝСҢ
X
a= (
С…
Рҝ
,
В {
x
1
= Сғ}
,завиСҒСҸСүРёС… РҫСӮ РҝР°СҖамРөСӮСҖР°
d,РҝСҖРёРҪР°РҙР»РөжаСүРөРіРҫ РҪРөРәРҫСӮРҫСҖРҫРјСғ РјРҪРҫР¶РөСҒСӮРІСғ СғРҝСҖавлСҸСҺСүРёС… РІРҫР·РҙРөР№СҒСӮРІРёР№
D.РқР°РұРҫСҖ С„СғРҪРәСҶРёР№
a= {
Р°
0(
x
0)
, a
1(
x
0
, x
1)
,...}
СҒРҫ Р·РҪР°СҮРөРҪРёСҸРјРё РІ
DРҪазСӢРІР°СҺСӮ СҒСӮСҖР°СӮРөРіРёРөР№, Р° РәажРҙСғСҺ РёР· С„СғРҪРәСҶРёР№
a
n=
Р°
Рҝ(
С…
0
,..., С…
Рҝ) вҖ“ СғРҝСҖавлРөРҪРёРөРј РІ РјРҫРјРөРҪСӮ РІСҖРөРјРөРҪРё
n.РҡажРҙРҫР№ СҒСӮСҖР°СӮРөРіРёРё
aРҫСӮРІРөСҮР°РөСӮ СғРҝСҖавлСҸРөРјР°СҸ РјР°СҖРәРҫРІСҒРәР°СҸ СҶРөРҝСҢ
X
a= (
С…
Рҝ
,
 ),
n =0,В 1,..., РіРҙРө
),
n =0,В 1,..., РіРҙРө В (
x
0
, x
1
..., С…
Рҝ)
=d(
С…
0
, С…)
Р С…
0
С…
1
(
a
0(
x
0))
... Px
n-1
x
n(
a
n-1(
x
0
, x
1
,..., x
n-1))
В (
x
0
, x
1
..., С…
Рҝ)
=d(
С…
0
, С…)
Р С…
0
С…
1
(
a
0(
x
0))
... Px
n-1
x
n(
a
n-1(
x
0
, x
1
,..., x
n-1)) В
В