 |
|
Популярные авторы:: БСЭ :: Борхес Хорхе Луис :: Горький Максим :: Азимов Айзек :: Херберт Фрэнк :: Чехов Антон Павлович :: Раззаков Федор :: Толстой Лев Николаевич :: Грин Александр :: Астафьев Виктор Петрович Популярные книги:: Дюна (Книги 1-3) :: The Boarding House :: Три цвета времени :: Упражнения по стилистике русского языка :: Преодоление :: Талисман из Рэдволла :: Плацдарм :: Закрой рот, джинн – кишки простудишь… :: Авантюристка :: Андропов. 7 тайн генсека с Лубянки |
Большая Советская Энциклопедия (МЕ)ModernLib.Net / Энциклопедии / БСЭ / Большая Советская Энциклопедия (МЕ) - Чтение (стр. 83)
п. с повышенными рабочими и транспортными скоростями; б) увеличение единичной мощности машин при снижении их удельной материалоёмкости и энергоёмкости с сохранением для подвижных машин-орудий манёвренности и проходимости; в) создание для различных отраслей народного хозяйства унифицированных базовых машин с комплектами сменного навесного и полуприцепного оборудования для каждого типоразмера, получение широкой номенклатуры мобильных машин-орудий, особенно погрузочно-разгрузочных, строительных, транспортных, дорожных и др.; г) применение новых высококачественных материалов (легированных сталей, лёгких сплавов, пластмасс, новых высокопрочных материалов), гидравлических и электрических бесступенчатых передач с широким диапазоном регулирования скоростей, автоматических устройств для сохранения оптимальных режимов работы, дистанционного и программного управления; д) улучшение условий работы обслуживающего персонала путём звукоизоляции рабочих помещений, их кондиционирования и др.; е) применение средств механизации учёта количества и качества продукции в условиях комплексной механизации и автоматизации производственных процессов.
Лит.:Маркс К., Капитал, т. 1, гл. 13 - Машины и крупная промышленность, Маркс К. и Энгельс Ф., Соч., 2 изд., т. 23; Ленин В. И., По поводу так называемого вопроса о рынках, Полн. собр. соч., 5 изд., т. 1; его же, Развитие капитализма в России, там же, т. 3; его же, Империализм, как высшая стадия капитализма, там же, т. 27; Материалы XXIV съезда КПСС, М., 1971; Материалы XXIII съезда КПСС, М., 1966; Народное хозяйство СССР. 1922-1972. Юбилейный статистический ежегодник, М., 1972; Ефимов А. Н., Советская индустрия, М., 1967; Пути развития техники в СССР [1917-1967], М., 1967; История техники, М., 1962; Эффективность комплексного развития техники в промышленности, М., 1966; Механизация и автоматизация производства, М., 1971; Современная научно-техническая революция. Историческое исследование, 2 изд., М., 1970; Очерки развития техники в СССР (в 5 кн.), кн. 1-4, М., 1968-71; Эффективность механизации и автоматизации труда, Л., 1972, В. Д. Лебедев, Д. П. Воробьев. «Механизация строительства» «Механиза'ция строи'тельства»,ежемесячный научно-технический и производственный журнал Госстроя СССР и Центрального правления научно-технического общества стройиндустрии. Издаётся в Москве с 1939 (с перерывом в 1941-45). Публикует материалы по комплексной механизации и автоматизации строительных процессов, эксплуатации и ремонту строительных и дорожных машин, механовооружённости строительных организаций, о средствах специализированного транспорта и организации транспортных перевозок. В журнале освещаются передовой опыт строек, новые методы планирования и экономического стимулирования в строительстве, изобретательская и рационализаторская деятельность, зарубежный опыт и др. Тираж (1974) 22 тыс. экземпляров. Механизация учёта Механиза'ция учёта,применение в бухгалтерском, статистическом и оперативном учёте предприятий, организаций и учреждений средств вычислительной техники для выполнения технических операций, связанных с учётом труда и заработной платы, учётом продукции, доходов и расходов, при составлении отчётных и вспомогательных сводок и т. п. Технические операции являются обычно массовыми и по своей трудоёмкости занимают до 70-75 % всех работ по учёту. М. у. значительно повышает производительность труда персонала, занятого учётными работами, ускоряет сроки получения нужной информации и повышает её точность. Начало механизации учётных работ связано с развитием в конце 19 в. техники механизированного счёта, с появлением перфораторов, табуляторов, арифмометров и др. Применение простейших счётно-решающих устройств повысило производительность труда при суммировании в 2-3 раза, умножении и делении - в 5-6 раз, а при группировке учётных данных - в 15-20 раз, что позволило значительно ускорить операции по обработке экономической информации и в конечном счёте способствовало улучшению управления производством. В СССР М. у. практическое развитие получила в 30-х гг. 20 в., когда была создана отрасль отечественного вычислительного машиностроения. Начиная с 1949 М. у. развивается в направлении комплексной механизации работ, связанных с различными формами учёта и отчётности. Для этой цели на предприятиях и в учреждениях в зависимости от объёма учётных работ создаются машиносчётные бюро (МСБ), (МСС) или (ВЦ). Комплексная М. у. предусматривает замену ручного труда машинным не только на наиболее трудоёмких операциях учёта, но и на всех остальных участках от первичной обработки документов до составления бухгалтерского баланса и сводных статистических отчётов. Наиболее сложная проблема М. у. - подготовка исходных данных. Она решается при комплексной автоматизации учёта; при этом первичные документы, доступные для непосредственного восприятия человеком, одновременно являются машинными носителями информации. Комплексная автоматизация учётных операций - высшая стадия М. у., она достигается в автоматизированных системах управления (АСУ). Лит.:Исаков В. И., Королев М. А., Основы проектирования механизации учётно-плановых работ, М., 1965; Фельдман Л. С., Застенкер Г. С., Организация и эксплуатация машино-счётных станций и бюро, 2 изд., М., 1972. Д. П. Брунштейн. Механизированная картотека Механизи'рованная картоте'ка,устройство для хранения карточек, в котором, в отличие от обычных картотек, процесс поиска карточек механизирован. В М. к. носители информации (карточки) размещаются в коробках (кассетах) или непосредственно на полках, как правило, в вертикальном положении. При составлении картотеки карточки группируют по какому-либо признаку (по алфавиту, адресам, виду информации, по характеру данных, заносимых на карточку, и т. п.) и каждой группе присваивается свой индекс (код). При поиске нужной карты оператор набирает (задаёт) на пульте управления её индекс или индекс её группы. Указание оператора преобразуется в сигнал управления электроприводом с указанием направления и шага перемещения полок. В блок управления М. к. входит «избирательное устройство», обеспечивающее автоматическую подачу нужной полки к оператору по кратчайшему пути, что особенно важно при большом объёме картотеки. Количество хранимых карточек и объём содержащейся в них информации зависят от формата карточек, размеров коробок (кассет), числа полок и конструкции М. к. Различают М. к. барабанного и элеваторного типов. Как правило, ёмкость барабанных М. к. от 10 тыс. до 50 тыс. карт (число полок от 3 до 8), элеваторных - от 20 тыс. до 500 тыс. карт (6-30 полок); формат карт от 70ґ100 ммдо 200ґ300 мм. Наибольшее распространение получили барабанные М. к., в которых полки с картами свободно подвешены между двумя дисками (колёсами), имеющими общую ось, связанную с электроприводом ( рис. ). Диаметр барабана от 500 до 800 мм;среднее время полного оборота барабана 16-20 сек.Барабан с полками (кассетами) размещается в корпусе с откидной крышкой, служащей одновременно и рабочим столом; при необходимости М. к. укомплектовывают приставным столом. М. к. применяются в конторах промышленных предприятий, отделах научно-технической информации институтов и организаций, регистратурах и т. п. М. к. значительно упрощает работу с карточками (к любой из них оператор имеет доступ непосредственно с рабочего места) и в 1,5-2 раза ускоряет процесс поиска нужной карты. Г. М. Белоусов. 
Механизированная картотека барабанного типа. Схема устройства: 1 - барабан; 2 - карточки; 3 - пульт управления; 4 - блок управления; 5 - рабочая доска (стол); 6 - электродвигатель привода; 7 - полка (кассета). 
Механизированная картотека барабанного типа. Внешний вид. Механизированная крепь Механизи'рованная крепь,горная крепь длинной очистной выработки (лавы), установка, разгрузка и перемещение которой вслед за подвигающимся забоем осуществляются механизированным способом, без разборки её на составляющие элементы. М. к. применяется главным образом на угольных шахтах (в СССР в работе около 800 комплектов, 1973); вместе с горным комбайном, забойным конвейером и крепями сопряжения лавы со штреками М. к. образуют выемочные комплексы или агрегаты, обеспечивающие механизацию всех основных рабочих процессов в очистном забое. Создание конструкций М. к. современного вида относится к середине 50-х гг. См. . М. к. делят: по функциям взаимодействия с боковыми породами - на поддерживающие, оградительные, оградительно-поддерживающие и поддерживающе-оградительные; по конструктивной схеме взаимодействия секций - на секционные, комплектные и агрегатированные. Крепи поддерживающего типа ( рис. а ) предназначены для предотвращения обрушения кровли в пределах рабочего пространства очистной выработки. Секции их состоят из перекрытия, от двух до шести опорных гидравлических стоек, основания и одного или двух гидродомкратов передвижения. Призабойная зона лавы поддерживается перекрытиями секции консольно. По длине перекрытие сплошное или состоит из двух и более звеньев, соединённых шарнирами, чем обеспечивается лучший контакт его с неровной поверхностью кровли. М. к. поддерживающего типа применяют в основном на пластах мощностью до 2 м,реже - до 3,5 м.Крепи оградительного типа испытывают только нагрузку, передаваемую обрушенными породами, защищая рабочее пространство ограждающими перекрытиями ( рис. б ) .Эти крепи не нашли широкого распространения. Крепи оградительно-поддерживающего и поддерживающе-оградительного типов имеют элементы, выполняющие функции поддержания кровли и защиты рабочего пространства от обрушающихся пород. Крепи поддерживающе-оградительного типа ( рис. в ) поддерживают кровлю на большей ширине рабочего пространства, чем крепи оградительно-поддерживающего типа ( рис. г ); секция имеет 2-3 гидростойки, что обусловливает возможность применения её в лавах с труднообрушающейся основной кровлей при слабой непосредственной кровле. Оградительная часть выполняется в виде прочного наклонного перекрытия. Эти крепи применяют в большинстве случаев на пластах мощностью от 1,6 до 2,5 м;разрабатываются (1974) конструкции для пластов до 3,5 м.Секции крепи оградительно-поддерживающего типа имеют прочное наклонное ограждающее перекрытие и относительно короткий козырёк, поддерживающий кровлю на небольшой ширине у забоя с помощью одной стойки. Крепи применяют при легко обрушаемых основных и слабых породах непосредственной кровли на пластах мощностью 2-3,5 м. М. к., секции которых не имеют постоянных кинематических связей между собой и с др. оборудованием лавы, называются секционными. Вследствие большой трудоёмкости передвижки и установки секционные крепи не нашли широкого применения. Комплектные крепи состоят из комплектов, включающих две и более кинематически связанных между собой секций. Комплекты крепи не имеют связей между собой. Секции агрегатированной крепи имеют постоянную кинематическую связь с базовым элементом очистного комплекса - ставом конвейера, направляющей рамой выемочной машины или специальным базовым элементом. Гидродомкратами передвижения снабжаются все или часть секций агрегатированной крепи. Наличие постоянной связи с базой и, как правило, направленное движение являются благоприятными предпосылками для дистанционного и автоматизированного управления всем комплексом оборудования очистного забоя. Агрегатированные крепи считаются наиболее перспективными. Управление гидроприводом и гидросистемой М. к. производится с кнопочных постов, устанавливаемых в лаве через 5-8 мили центрального пульта, расположенного в штреке. В СССР на пластах пологого падения нашли применение М. к.: поддерживающие М-87 и М-97; поддерживающе-оградительные МК и М-81; оградительно-поддерживающие ОМКТ-М и ОКП и оградительные КТУ. Внедряются М. к. для пластов наклонного (М-87ДН, КМ-127 и др.), а также крутого (АЩ, КГД-2, АНЩ, АКД и др.) падения. Наиболее разнообразны М. к. поддерживающего типа. За рубежом развитие М. к. идёт по пути создания и совершенствования в основном крепей поддерживающего типа как в агрегатированном (крепи фирм «Галлик», «Даути» и др. - Великобритания), так и в комплектном («Вестфалия», «Клекнер-Ферроматик» - ФРГ, «Карлтон» - Великобритания, «Саэ-Сомеми» - Франция, DVP-3 - ЧССР и др.) исполнении. Совершенствование М. к. осуществляется по пути снижения их металлоёмкости и стоимости, повышения надёжности всех узлов, оптимизации параметров, создания конструкций, обеспечивающих в комплексе с выемочными и транспортными средствами полную автоматизацию процессов выемки, транспортирования угля, крепления и управления горным давлением в очистном забое и на сопряжении его с подготовительными выработками. Лит.:Справочник по креплению горных выработок, М., 1972. В. В. Жуков. 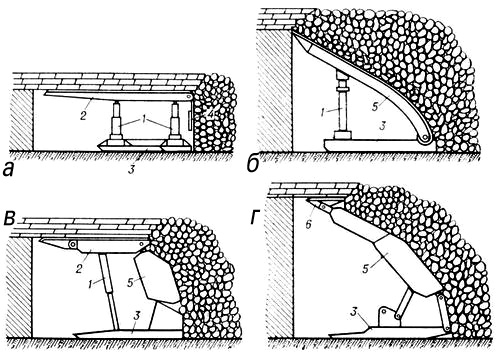
Схемы механизированной крепи: а - поддерживающего типа; б - оградительного типа; в - поддерживающе-оградительного типа; г - оградительно-поддерживающего типа; 1 - опорные элементы - стойки; 2 - перекрытие; 3 - основание; 4 - защитное ограждение; 5 - ограждающее перекрытие; 6 - поддерживающий козырёк. Механизированные войска Механизи'рованные войска',войска, состоящие из мотострелковых (механизированных), танковых, артиллерийских и др. частей и подразделений. Понятие «М. в.» появилось в различных армиях к началу 1930-х гг. В 1929 в СССР было создано Центральное управление механизации и моторизации РККА и сформирован первый опытный механизированный полк, развёрнутый в 1930 в первую механизированную бригаду в составе танкового, артиллерийского, разведывательных полков и подразделений обеспечения. Бригада имела 110 танков МС-1 и 27 орудий и предназначалась для исследования вопросов оперативно-тактического применения и наиболее выгодных организационных форм механизированных соединений. В 1932 на базе этой бригады был создан первый в мире механизированный корпус - самостоятельное оперативное соединение, включавшее 2 механизированные и одну стрелково-пулемётную бригады, отдельный зенитно-артиллерийский дивизион и насчитывавшее свыше 500 танков и 200 автомобилей. Название «М. в.» было закреплено в 1932 во временном наставлении механизированных войск РККА, которое называется «Вождение и бой самостоятельных механизированных соединений». К началу 1936 имелось 4 механизированных корпуса, 6 отдельных бригад, а также 15 полков в кавалерийских дивизиях. В 1937 Центральное управление механизации и моторизации РККА было переименовано в Автобронетанковое управление Красной Армии, а в декабре 1942 было образовано Управление командующего бронетанковыми и механизированными войсками. Во время Великой Отечественной войны 1941-45 бронетанковые и механизированные войска стали основной ударной силой сухопутных войск. К концу 1943 в состав механизированного корпуса входили 3 механизированные и 1 танковая бригады, 1-2 самоходно-артиллерийских полка, миномётный, зенитный, артиллерийский, истребительно-противотанковый артиллерийский полки, отдельный гвардейский миномётный дивизион реактивной артиллерии и части обеспечения и обслуживания [всего 16369 чел., 246 танков и самоходно-артиллерийских установок (Т-34 - 176, Т-70 - 21, САУ - 49), 252 орудия и миномёта, свыше 1,8 тыс. автомашин]. Механизированные соединения наряду с танковыми использовались для ввода в прорыв и развития успеха на большую глубину, для окружения и разгрома противника, преследования и выполнения др. задач. В мае 1954 бронетанковые и механизированные войска были переименованы в бронетанковые войска, в 1959 - в . В 1957 стрелковые и механизированные дивизии были преобразованы в мотострелковые дивизии. В США, Франции, Турции и некоторых др. странах механизированные дивизии входят в состав сухопутных войск (пехоты). Л. Г. Бархударов. Механизированный инструмент Механизи'рованный инструме'нт, с встроенным двигателем. По виду питающей энергии М. и. может быть пневматическим, электрическим, гидравлическим. Распространение получили такие ручные машины, как сверлильные, шлифовальные, резьбозавёртывающие, различные виды молотков, пил и др. Механизм Механи'зм(от греч. mechane - машина), система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения др. тел. М. составляют основу большинства , применяются во многих приборах, аппаратах и технических устройствах. Твёрдое тело, входящее в состав М., называемое звеном, может состоять из одной или нескольких неподвижно соединённых деталей (отдельно изготовленных частей). Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется (см. также ). Наиболее распространённые кинематической пары: вращательная (шарнир), поступательная (ползун и направляющая), винтовая (винт и гайка), сферическая (шаровой шарнир). Если в преобразовании движения, кроме твёрдых тел (звеньев), участвуют жидкие или газообразные тела, то М. называют соответственно гидравлическим или пневматическим. Для изучения движения звеньев М. составляется кинематическая схема, на которой указываются данные, необходимые для определения положения звеньев. На рис. 1 показан чертёж М. двигателя внутреннего сгорания и его кинематическая схема. На кинематической схеме кривошип и шатун условно представлены в виде отрезков, соединяющих центры шарниров, ползун - в виде прямоугольника, стойка О - в виде отрезка со штриховкой, изображающего направляющую ползуна, и треугольника с шарниром, имеющим неподвижную ось вращения. Для определения по кинематической схеме положения всех подвижных звеньев М. достаточно знать положение одного звена. Звено, положение которого для любого момента времени задано, называют начальным. При исследовании М. число начальных звеньев должно совпадать с числом его , т. е. с числом независимых переменных, определяющих положения всех звеньев. М. двигателя внутреннего сгорания имеет одну степень свободы; в качестве независимой переменной для М. можно принять угол j. В шарнирном М. с двумя степенями свободы, ( рис. 2 ) независимыми переменными могут быть углы j 1и j 2, или j 1и j 3, или, наконец, j 2и j 3. М. применяется в тех случаях, когда нельзя получить непосредственно требуемое движение тел и возникает необходимость в преобразовании движения. Например, ротор электродвигателя и подшипники, в которых он вращается, не образуют М., т. к. в этом случае электроэнергия непосредственно преобразуется в требуемое движение без какого-либо промежуточного преобразования механического движения. М. появляется только тогда, когда требуется уменьшить угловую скорость выходного вала, т. е. устанавливается понижающая зубчатая передача. М. двигателя внутреннего сгорания преобразует прямолинейное движение поршня во вращательном движение коленчатого вала. М., предназначенный для преобразования вращательных или прямолинейных движений во вращательные (и наоборот), называется передаточным М., или . В зависимости от вида звеньев различают зубчатые, рычажные, фрикционные, цепные, ремённые передачи. К этому же типу М. относятся гидро- и пневмопередачи. М., служащий для воспроизведения движения некоторой точки по заданной траектории, называется направляющим. Наибольшее распространение имеют М., воспроизводящие движение по прямой линии (прямолинейно-направляющие) и по дуге окружности (круговые направляющие). М., предназначенные для сложного перемещения твёрдого тела в пространстве или в плоскости, называются перемещающими. В 60 - начале 70-х гг. 20 в. появились новые М., созданные для выполнения задач, связанных с космической техникой (М. для передачи вращения в вакууме, М. пространственной ориентации), медицинской техники (регулируемые аппараты, биопротезы), для работы в средах, недоступных или опасных для человека (подводные глубины, космос, атомные реакторы). Для выполнения этих работ нашли применение манипуляторы, основу которых составляют пространственные М. со многими степенями свободы. Развитие манипуляторов привело к созданию промышленных , позволяющих автоматизировать процессы обработки, монтажа и сборки изделий. См. также . Лит.:Кожевников С. Н., Есипенко Я. И., Раскин Я. М., Механизмы, 3 изд., М., 1965; Артоболевский И. И., Механизмы в современной технике, т, 1-2, М., 1970-71. И. И. Артоболевский, Н. И. Левитский. 
Рис. 1. Чертёж (а) и кинематическая схема (б) механизма двигателя внутреннего сгорания; 1 - коленчатый вал (кривошип); 2 - шатун; 3 - ползун; О - стойка; j - независимая переменная, угол поворота кривошипа. 
Рис. 2. Схема шарнирного механизма с двумя степенями свободы (с двумя начальными звеньями). Механизмы речи Механи'змы ре'чи,условное название системы психофизиологических предпосылок, позволяющих человеку строить осмысленные высказывания и понимать чужую речь. В основе М. р. лежат функциональные физиологические системы, складывающиеся у человека в процессе его индивидуального развития под активным воздействием предметной деятельности и общения с др. людьми и невозможные без некоторых врождённых способностей и умений (например, правильной координации артикуляции, слогообразования и дыхания). Принцип системной локализации речевых функций в коре больших полушарий головного мозга обеспечивает возможность различной психофизиологической обусловленности одних и тех же (по языковой структуре) речевых высказываний. М. р. изучаются физиологией речи, психологией речи, а в их отношении к языковой структуре высказываний - и . Лит.:Выготский Л. С., Избранные психологические исследования, М., 1956; Жинкин Н. И., Механизмы речи, М., 1958; Лурия А. Р., Мозг и психические процессы, т. 1-2, М., 1963-70; его же, Высшие корковые функции человека, 2 изд., М., 1969; Леонтьев А. А., Психолингвистические единицы и порождение речевого высказывания, М., 1969. А. А. Леонтьев. Механика Меха'ника[от греч. mechanike (tйchne) - наука о машинах, искусство построения машин], наука о механическом движении материальных тел и происходящих при этом взаимодействиях между телами. Под механическим движением понимают изменение с течением времени взаимного положения тел или их частиц в пространстве. Примерами таких движений, изучаемых методами М., являются: в природе - движения небесных тел, колебания земной коры, воздушные и морские течения, тепловое движение молекул и т. п., а в технике - движения различный летательных аппаратов и транспортных средств, частей всевозможных двигателей, машин и механизмов, деформации элементов различных конструкций и сооружений, движения жидкостей и газов и многие др. Рассматриваемые в М. взаимодействия представляют собой те действия тел друг на друга, результатом которых являются изменения механического движения этих тел. Их примерами могут быть притяжения тел по закону всемирного тяготения, взаимные давления соприкасающихся тел, воздействия частиц жидкости или газа друг на друга и на движущиеся в них тела и др. Обычно под М. понимают т. н. классическую М., в основе которой лежат и предметом которой является изучение движения любых материальных тел (кроме элементарных частиц), совершаемого со скоростями, малыми по сравнению со скоростью света. Движение тел со скоростями порядка скорости света рассматривается в , а внутриатомные явления и движение элементарных частиц изучаются в . При изучении движения материальных тел в М. вводят ряд абстрактных понятий, отражающих те или иные свойства реальных тел; таковы: 1) Материальная точка - объект пренебрежимо малых размеров, имеющий массу; это понятие применимо, если в изучаемом движении можно пренебречь размерами тела по сравнению с расстояниями, проходимыми его точками. 2) Абсолютно твёрдое тело - тело, расстояние между двумя любыми точками которого всегда остаётся неизменным; это понятие применимо, когда можно пренебречь деформацией тела. 3) Сплошная изменяемая среда; это понятие применимо, когда при изучении движения изменяемой среды (деформируемого тела, жидкости, газа) можно пренебречь молекулярной структурой среды. При изучении сплошных сред прибегают к следующим абстракциям, отражающим при данных условиях наиболее существенные свойства соответствующих реальных тел: идеально упругое тело, пластичное тело, идеальная жидкость, вязкая жидкость, идеальный газ и др. В соответствии с этим М. разделяют на: М. материальной точки, М. системы материальных точек, М. абсолютно твёрдого тела и М. сплошной среды; последняя, в свою очередь, подразделяется на теорию упругости, теорию пластичности, гидромеханику, аэромеханику, газовую динамику и др. В каждом из этих разделов в соответствии с характером решаемых задач выделяют: статику - учение о равновесии тел под действием сил, кинематику - учение о геометрических свойствах движения тел и динамику - учение о движении тел под действием сил. В динамике рассматриваются 2 основные задачи: нахождение сил, под действием которых может происходить данное движение тела, и определение движения тела, когда известны действующие на него силы. Для решения задач М. широко пользуются всевозможными математическими методами, многие из которых обязаны М. самим своим возникновением и развитием. Изучение основных законов и принципов, которым подчиняется механическое движение тел, и вытекающих из этих законов и принципов общих теорем и уравнений составляет содержание т. н. общей, или теоретической, М. Разделами М., имеющими важное самостоятельное значение, являются также теория , теория и , теория , , теория автоматического регулирования (см. ), теория . Важное место в М., особенно в М. сплошных сред, занимают экспериментальные исследования, проводимые с помощью разнообразных механических, оптических, электрических и др. физических методов и приборов. М. тесно связана со многими др. разделами физики. Ряд понятий и методов М. при соответствующих обобщениях находит приложение в оптике, статистической физике, квантовой М., электродинамике, теории относительности и др. (см., например, , , механики, , ). Кроме того, при решении ряда задач , теории , теплообмена в движущихся жидкостях и газах, , и др. одновременно используются методы и уравнения как теоретической М., так и соответственно термодинамики, молекулярной физики, теории электричества и др. Важное значение М. имеет для многих разделов , особенно для . Часть М., непосредственно связанную с техникой, составляют многочисленные общетехнические и специальные дисциплины, такие, как , , кинематика механизмов, динамика машин и механизмов, теория , внешняя , , теория движения различных наземных, морских и воздушных транспортных средств, теория регулирования и управления движением различных объектов, строительная М., ряд разделов технологии и многое др. Все эти дисциплины пользуются уравнениями и методами теоретической М. Т. о., М. является одной из научных основ многих областей современной техники. Основные понятия и методы механики.Основными кинематическими мерами движения в М. являются: для точки - её и , а для твёрдого тела - скорость и ускорение поступательного движения и и вращательного движения тела. Кинематическое состояние деформируемого твёрдого тела характеризуется относительными удлинениями и сдвигами его частиц; совокупность этих величин определяет т. н. тензор деформаций. Для жидкостей и газов кинематическое состояние характеризуется тензором скоростей деформаций; кроме того, при изучении поля скоростей движущейся жидкости пользуются понятием о вихре, характеризующем вращение частицы. Основной мерой механического взаимодействия материальных тел в М. является . Одновременно в М. широко пользуются понятием относительно точки и относительно оси. В М. сплошной среды силы задаются их поверхностным или объёмным распределением, т. е. отношением величины силы к площади поверхности (для поверхностных сил) или к объёму (для массовых сил), на которые соответствующая сила действует. Возникающие в сплошной среде внутренние напряжения характеризуются в каждой точке среды касательными и нормальными напряжениями, совокупность которых представляет собой величину, называемую тензором . Среднее арифметическое трёх нормальных напряжений, взятое с обратным знаком, определяет величину, называемую в данной точке среды. Помимо действующих сил, движение тела зависит от степени его инертности, т. е. от того, насколько быстро оно изменяет своё движение под действием приложенных сил. Для материальной точки мерой инертности является величина, называемая точки. Инертность материального тела зависит не только от его общей массы, но и от распределения масс в теле, которое характеризуется положением центра масс и величинами, называемыми осевыми и центробежными ; совокупность этих величин определяет т. н. тензор инерции. Инертность жидкости или газа характеризуется их . 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90 |
|||||||