Лит.:Николаи Е. Л., Гироскоп и некоторые его технические применения, М. — Л., 1947 (популярное изложение); Граммель Р., Гироскоп, его теория и применения, пер. с нем., т. 1—2, М., 1952; Булгаков Б. В., Прикладная теория гироскопов, 2 изд., М., 1955; Ишлинский А. Ю., Механика гироскопических систем, М., 1963.
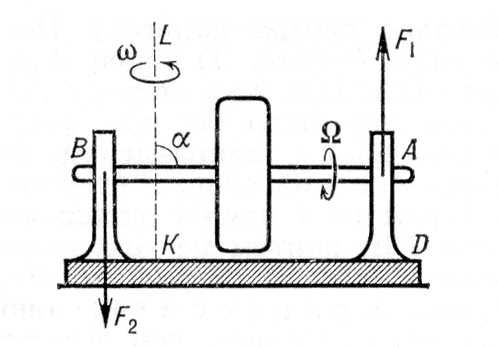
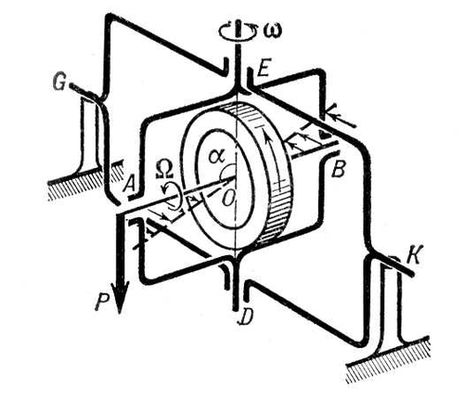
С. М. Тарг. Рис. 8. Действие гироскопических сил на подшипники, закрепляющие ось, при повороте основания прибора вокруг оси KL.
Рис. 6. а — прецессия артиллерийского снаряда; б и в — схемы движения снарядов и их траектории соответственно; б — для невращающегося снаряда; в — для вращающегося.
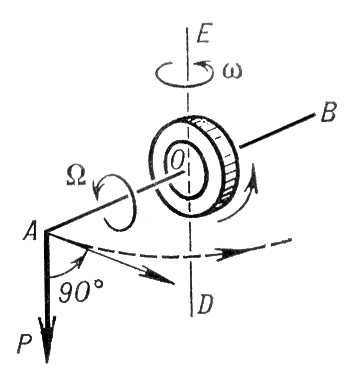
Рис. 4. Правило определения направления прецессии: глядя на ротор из точки приложения силы Р, надо установить, как вращается ротор — по ходу или против хода часовой стрелки. После этого мысленно повернуть вектор АР вокруг оси АВ на 90° в ту же сторону (т. е. по ходу или против хода часовой стрелки соответственно); тогда он и укажет направление прецессии (здесь — AD).
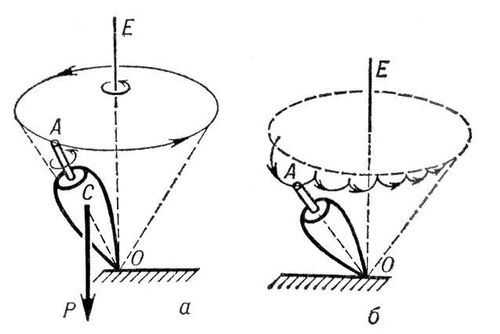
Рис. 5. а — прецессия волчка под действием силы тяжести; б — движение оси волчка при медленном собственном вращении.
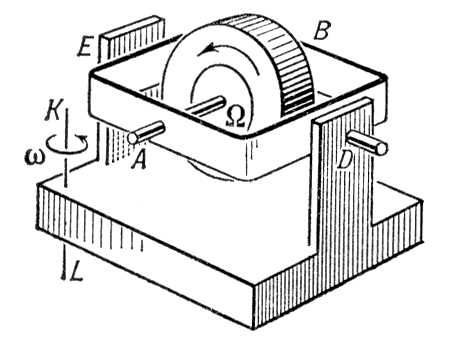
Рис. 7. Гироскоп с двумя степенями свободы.
Рис. 1. Волчок; ОА — его ось, Р — сила тяжести.
Рис. 3. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению Р.
Рис. 2. Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 — вокруг оси GK; следовательно, ось ротора может занять любое положение в пространстве. О — центр подвеса, совпадающий с центром тяжести гироскопа.
Гироскоп направления
Гироско'п направле'ния, гироазимут, курсовой гироскоп, гирополукомпас,
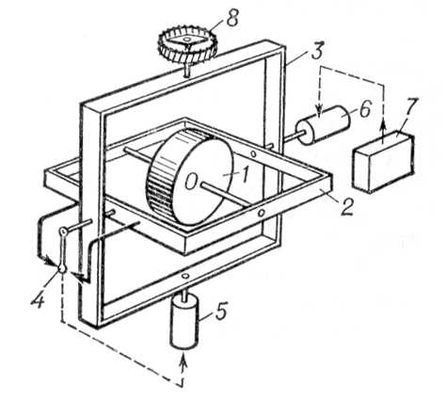
для определения углов рыскания (изменения курса) и углов поворота объекта вокруг вертикальной оси. При согласовании Г. н. с плоскостью меридиана (например, по данным какого-нибудь компаса) он указывает текущее значение курса объекта. Г. н. представляет собой трёхстепенной астатический (уравновешенный)
, снабженный горизонтальной и азимутальной системами коррекции (см.
рис.
). Горизонтальная система коррекции, удерживающая внутреннее карданово кольцо
2(ось гироскопа
1) в плоскости горизонта, состоит из маятника-корректора
4, определяющего угол отклонения оси гироскопа от плоскости горизонта, и датчика моментов
5, прикладывающего к гироскопу соответствующие корректирующие моменты. Азимутальная система коррекции, удерживающая ось гироскопа в заданном азимутальном направлении (т. е. под заданным углом, например, к плоскости меридиана), состоит из датчика моментов
6и вычислительного устройства 7, вырабатывающего момент азимутальной коррекции. При этом учитываются поправки на вращение Земли и на движение объекта относительно Земли. Азимутальная коррекция Г. н. может также осуществляться от чувствительного элемента, обладающего избирательностью по отношению к стабилизируемому направлению, например от магнитной стрелки (см.
). Потенциометр
8служит для съёма углов рыскания и поворота объекта вокруг вертикальной оси. Погрешности Г. н. характеризуются уходами оси гироскопа в азимуте, которые могут составлять от единиц до десятых долей градуса в час.
Г. н. используют для определения углов рыскания и поворота летательных аппаратов и кораблей, а также для кратковременного указания курса. Г. н. может применяться и как чувствительный элемент системы автоматической стабилизации курса объекта, например в
летательного аппарата, в автомате курса торпеды и др.
А. Ю. Ишлинский, С. С. Ривкин.
Принципиальная схема гироскопа направления: 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца; 4 — маятник-корректор; 5, 6 — датчики моментов; 7 — вычислительное устройство; 8 — потенциометр.
Гироскопические устройства
Гироскопи'ческие устро'йства, гироскопические приборы, электромеханические устройства, содержащие
, и предназначенные для определения параметров, характеризующих движение (или положение) объекта, на котором они установлены, а также для стабилизации этого объекта. Г. у. используют при решении задач навигации, управления подвижными объектами и др.
Наиболее существенными признаками, характеризующими применяемые в технике разнообразные Г. у., являются: тип гироскопа, физический принцип построения чувствительного гироскопического элемента, тип подвеса, назначение Г. у.
Типы гироскопов.Различают два основных типа гироскопов: с тремя и двумя степенями свободы. Гироскопы с тремя степенями свободы делятся на уравновешенные, или астатические, и неуравновешенные, или позиционные.
Астатическим называется гироскоп, у которого центр тяжести совпадает с точкой пересечения осей карданова подвеса (т. е. с точкой подвеса). Сила тяжести не влияет на движение оси такого гироскопа и её уходы при внешних возмущениях могут вызываться лишь моментами сил в осях подвеса (моменты сил трения и др.). При отсутствии моментов внешних сил гироскоп называется свободным. Хотя астатические гироскопы не обладают избирательностью по отношению к заданному направлению, т. е. «направляющей силой», стремящейся привести ось гироскопа в определенное положение, они используются в ряде Г. у., например, в
, гировертикалях и др., причём прецизионные гироскопы могут применяться без корректирующих устройств.
Позиционным называется гироскоп, обладающий избирательностью по отношению к некоторому направлению; при отклонении его оси от этого направления возникает «направляющая сила», стремящаяся вернуть ось гироскопа в заданное положение. Для придания Г. у. позиционных свойств применяют два способа. Первый состоит в смещении центра тяжести гироскопа относительно точки подвеса. Он используется в
, у которых «направляющая сила» возникает при отклонении оси гироскопа от плоскости меридиана, и в гиромаятниках, у которых «направляющая сила» возникает при отклонении оси гироскопа от вертикали места. Др. способ состоит в применении астатического гироскопа и соответствующей системы коррекции, например маятниковой (см.
).
Гироскопы с двумя степенями свободы используют в Г. у. чаще всего в качестве дифференцирующих и интегрирующих гироскопов, которые осуществляют дифференцирование (или интегрирование) входного сигнала, т. е. измеряют производную (или интеграл) от той величины, на воздействие которой реагирует Г. у. Например, в
дифференцирующий гироскоп, реагируя на поворот объекта, измеряет его угловую скорость, а поплавковый интегрирующий гироскоп (см.
), реагируя на угловую скорость объекта, измеряет угол его поворота.
Физические принципы построения чувствительных гироскопических элементов.Различают гироскопы с механическим ротором, с жидкостным ротором, вибрационные, лазерные, ядерные. Наиболее распространены гироскопы с механическим ротором: у них носителем кинетического момента является быстровращающееся массивное твёрдое тело — ротор. Носителем кинетического момента может быть и жидкая среда.
в качестве чувствительного элемента содержат вибрирующие массы (например, ротор с упругим подвесом или упругие пластины) и служат для определения угловой скорости объекта. Лазерный гироскоп представляет собой устройство, в котором используется оптический
направленного излучения и содержится плоский замкнутый контур (образованный тремя и более зеркалами), где циркулируют два встречных световых потока (луча); он также служит для определения угловой скорости объекта (см.
). Ядерный гироскоп основан на том свойстве, что ядро атома содержит протоны, обладающие спиновыми и орбитальными моментами количества движения, а также связанными с ними магнитными моментами. При этом наличие механического вращательного момента у ядра сообщает ему свойства гироскопа, а наличие магнитного момента даёт возможность ориентировать ось этого гироскопа в пространстве и определять её положение. Ядерные гироскопы могут использоваться в качестве стабилизаторов направления, датчиков угловых скоростей.
Типы подвесов гироскопов. В гироскопах с механическим ротором различают механический, поплавковый, газовый, магнитный, электростатический типы подвесов. В большинстве Г. у. используются гироскопы с механическим подвесом; выполненным в виде карданова подвеса (см.
).
В различных двух- и трёхстепенных гироскопах для разгрузки механических опор применяются жидкостные, или поплавковые, подвесы (например, в поплавковом интегрирующем гироскопе), вследствие чего подобные гироскопы мало подвержены вибрационным, ударным и др. возмущающим воздействиям и обладают высокой точностью.
Существенное повышение точности Г. у. достигается при применении гироскопов с газовым подвесом. Ротор такого гироскопа обычно имеет сферическую форму и опирается па чрезвычайно тонкий газовый слой, образующийся между шаром-ротором и специальной опорой. Такой шар является практически свободным гироскопом. Газовые опоры могут также применяться в осях подвеса ротора и кардановых колец.
В некоторых Г. у. используется гироскоп с магнитным подвесом, ротор которого, выполненный в виде ферритовой сферы, поддерживается магнитным полем во взвешенном состоянии. Необходимые характеристики поля автоматически регулируются специальной следящей системой. Другой разновидностью магнитного подвеса является т. н. криогенный подвес ротора, в котором используется взаимодействие магнитных полей, создаваемых токами в
. Поддерживающие силы магнитного поля возникают при изменении положения ротора по отношению к элементам подвеса. Материал ротора, катушек электромагнитов и специальных экранов приводится в сверхпроводящее состояние путём глубокого охлаждения.
В гироскопе с электростатическим подвесом ротор представляет собой полую сферу, наружная поверхность которой имеет высокую проводимость. Ротор помещается между электродами, к которым подводится высокое напряжение, регулируемое специальной следящей системой. Под действием электростатических сил ротор центрируется в пространстве между электродами.
Основные Г. у.По назначению Г. у. подразделяют на следующие группы: 1) Г. у. для определения угловых отклонений объекта. Сюда относятся различные астатические и позиционные гироскопы, а именно: гироскопы направления, определяющие азимутальные отклонения объекта (углы рыскания корабля или летательного аппарата), и гировертикали или гиромаятники, определяющие отклонения объекта относительно плоскости горизонта (углы килевой и бортовой качки корабля, углы тангажа и крена летательного аппарата); 2) Г. у. для определения угловых скоростей и угловых ускорений объекта, в которых используются дифференцирующие гироскопы. К ним относятся гиротахометры и вибрационные гироскопы, определяющие угловые скорости вращения объекта и гиротахоакселерометры, определяющие угловые скорости и угловые ускорения вращения объекта; 3) Г. у. для определения интегралов от входных величин, в которых используются интегрирующие гироскопы: гироскопические интеграторы угловых скоростей, определяющие углы отклонения объекта; интегро-дифференцирующие гироскопы, определяющие углы и угловые скорости вращения объекта, а также гироскопические интеграторы линейных ускорений, которые служат для нахождения линейной скорости объекта; 4) Г. у. для стабилизации объекта или отдельных приборов и устройств, а также для определения угловых отклонений объекта, называют
; 5) Г. у. для решения навигационных задач. Сюда относятся: гирокомпасы, определяющие курс объекта и азимут (пеленг) ориентируемого направления;
, определяющие магнитный курс объекта, гирошироты, предназначенные для определения широты места; гирошироткомпасы, с помощью которых определяются курс и широта местоположения объекта; гирогоризонткомпасы, служащие для определения курса объекта и углов отклонения его относительно плоскости горизонта,
, которые предназначены для нахождения ряда параметров, необходимых для навигации объектов;
, которые служат для определения углов рыскания, искусственного спутника Земли; гирорулевые, обеспечивающие автоматическое управление курсом корабля.
Г. у. применяют в морском флоте, авиации, ракетной и космической технике, народном хозяйстве для решения разнообразных задач навигации и управления подвижными объектами, а также при проведении некоторых специальных работ (маркшейдерских, геодезических, топографических и др. — см.
).
Лит.:Крылов А. Н., Общая теория гироскопов и некоторых технических их применений. Собр. трудов, т. 8, М. — Л., 1950; Булгаков Б. В., Прикладная теория гироскопов, 2 изд., М., 1955; Николаи Е. Л., Теория гироскопов, Л. — М., 1948; Ишлинский А. Ю., Механика гироскопических систем, М., 1963; Кудревич Б. И., Теория гироскопических приборов, т. 1—2, Л., 1963—65; Меркин Д. Р., Гироскопические системы, М., 1956; Ройтенберг Я. Н., Гироскопы, М., 1966; Граммель Р., Гироскоп, его теория и применения, пер. с нем., т. 1—2, М., 1952; Пельпор Д. С., Гироскопические приборы и автопилоты, М., 1964; Ривкин С. С., Теория гироскопических устройств, ч. 1—2, Л., 1962—64 (библ.).
А. Ю. Ишлинский, С. С. Ривкин.
Гироскопический интегратор
Гироскопи'ческий интегра'тор,
, содержащее т. и. интегрирующий гироскоп, который служит для определения интеграла от воздействующей на него величины. Различают Г. и. угловой скорости и Г. и. линейных ускорений.
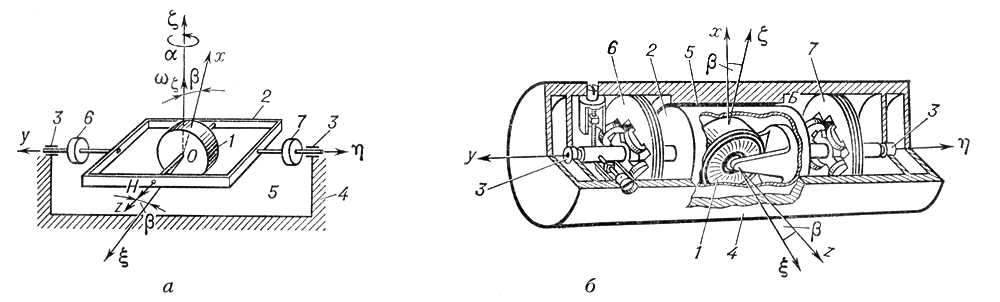
Г. и. угловой скорости служит для определения угла поворота объекта. Наиболее совершенным является поплавковый Г. и. (
рис. 1
). Ротор
1гироскопа установлен в рамке
2, представляющей собой поплавок цилиндрической формы; ось
Oy(
Oh) вращения поплавка установлена в подшипниках, расположенных в корпусе
4прибора, имеющего также цилиндрическую форму. Зазор
5между поплавком и корпусом, а также всё свободное пространство внутри корпуса заполнено жидкостью с большой плотностью. Указанная система образует жидкостный подвес. Подъёмная сила жидкости должна быть равна весу гироузла; при этом подшипники
3подвеса оказываются практически полностью разгруженными; жидкость в зазоре между цилиндрическими поверхностями поплавка и корпуса прибора обеспечивает демпфирование, момент которого пропорционален угловой скорости вращения поплавка. Применение жидкостного подвеса частично предохраняет ось подвеса (ось вращения поплавка) от воздействия на неё вибраций, ударов и др. В приборе предусмотрено автоматическое регулирование температуры, что необходимо для поддержания постоянства плотности и вязкости жидкости, а также постоянства положения центра тяжести поплавкового гироузла и центра давления жидкости относительно оси вращения гироузла.
При повороте объекта вокруг оси
Oz, (входная ось или ось чувствительности) с угловой скоростью
w
zвозникает гироскопический момент
Hw
z, где
Н— кинетический момент гироскопа, вызывающий вращение поплавка (рамки) вокруг оси
Oh(выходная ось) с угловой скоростью
b(где
b— угол поворота поплавка). При этом на поплавок начинает действовать момент демпфирования
bb(
b— коэффициент демпфирования), уравновешивающий гироскопический момент. Равенство
bb=Hw
zпосле интегрирования даёт
bb=Ha, что позволяет по углу
bповорота поплавка вокруг оси
Oh, снимаемого с датчика
6, определять искомый угол поворота
aобъекта вокруг оси
Oz.
Поплавковый Г. и. является прецизионным прибором. Основные достоинства двухстепенных поплавковых Г. и. состоят в высокой точности (собственный уход — десятые и сотые доли градуса в 1
ч); малой подверженности вибрационным, ударным и др. возмущающим воздействиям; возможности использования для решения широкого класса задач, возлагаемых на гироскопические устройства. Поплавковые Г. и. применяются в гироскопах направления, гировертикалях, системах гироскопической стабилизации, используемых на различных летательных аппаратах и кораблях.
Г. и. линейных ускорений служит для определения составляющей линейной скорости центра тяжести объекта вдоль заданного направления. Г. и. представляет собой
с тремя степенями свободы, центр тяжести которого смещен относительно точки подвеса. Вследствие этого Г. и. чувствителен к поступательным ускорениям объекта, т.к. возникающий при этом момент сил инерции вызывает прецессию гироскопа с угловой скоростью, пропорциональной указанному моменту, т. е. величине ускорения объекта. Тогда угол прецессии будет пропорционален линейной скорости объекта, что позволяет, измерив этот угол, найти искомую скорость.
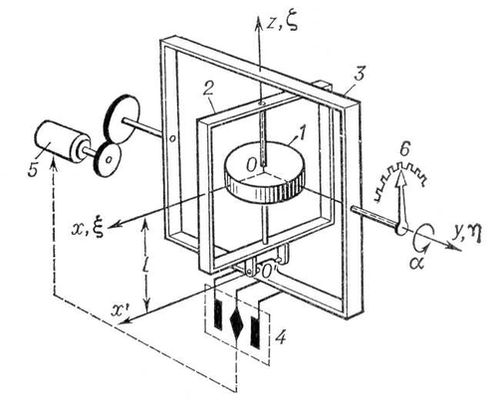
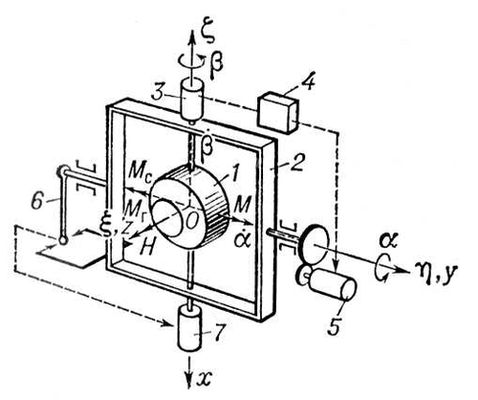
Г. и. реагирует на кажущееся ускорение объекта, т. е. на разность между абсолютным ускорением объекта и гравитационным ускорением (ускорением силы тяготения). Вследствие этого показания прибора пропорциональны интегралу от кажущегося ускорения, т. е. кажущейся скорости. На
рис. 2
приведена принципиальная схема Г. и. с трёхстепенным неуравновешенным (тяжёлым) гироскопом гиромаятникового типа. Ротор
1, установленный в гирокамере 2, статически неуравновешен относительно оси качания
O'x'в наружном кардановом кольце (рамке)
3; относительно оси
Oh(
Оу) вращения рамки система полностью уравновешена. Для обеспечения перпендикулярности оси
Ozгироскопа к оси
Oh(
Оу) служит система коррекции, состоящая из контактного приспособления
4и управляемого им стабилизирующего двигателя
5.
Г. и. реагирует на составляющую
wлинейного ускорения объекта вдоль оси
Oh. Показания Г. и. (величина линейной скорости объекта), пропорциональные углу
aповорота рамки
3, снимаются с потенциометра
6. Если ось
Oh(
Оу), совпадающая с продольной осью объекта, горизонтальна, то из формулы для угловой скорости прецессии наружной рамки после интегрирования получается

где
v
0—начальная скорость вдоль оси
Oh,
Н—кинетический момент гироскопа;
т —масса ротора и гирокамеры;
1— смещение вдоль оси
Ozцентра тяжести ротора и гирокамеры относительно точки подвеса;
v —искомая составляющая скорости объекта вдоль оси
Oh, которая и определяется по значению угла, снимаемого с потенциометра
6.
Если объект движется под углом к плоскости горизонта (в частности, вертикально), то для определения скорости
vобъекта из угла
aследует вычесть тот угол, на который повернётся рамка под действием силы тяготения.
Г. и. линейных ускорений применяются главным образом в ракетной технике. Возможно применение Г. и. в гироинерциальной вертикали (см.
), где он заменяет акселерометр и интегратор.
А. Ю. Ишлинский, С. С. Ривкин.
Рис. 2. Принципиальная схема гироскопического интегратора линейных ускорений: 1 — ротор; 2 — гирокамера; 3 — наружное карданово кольцо (рамка); 4 — контактное приспособление; 5 — стабилизирующий двигатель; 6 — потенциометр; Oxhz — оси системы отсчёта; Oxyz — оси, связанные с гирокамерой.
Рис. 1. Схема поплавкового гироскопического интегратора: а — упрощенная принципиальная; б — кинематическая; 1 — ротор; 2 — рамка (поплавок); 3 — подшипники; 4 — корпус прибора; 5 — зазор между корпусом и поплавком; 6 — датчик угла; 7 — датчик моментов; Охуz — оси, связанные с рамкой (поплавком); Oxhz — оси системы отсчёта.
Гиростабилизатор
Гиростабилиза'тор,
, предназначенное для стабилизации отдельных объектов или приборов, а также для определения угловых отклонений объектов. По принципу действия Г. делятся на непосредственные, силовые и индикаторные.
Непосредственные Г. — устройства, в которых непосредственно используются стабилизирующие свойства трёхстепенного
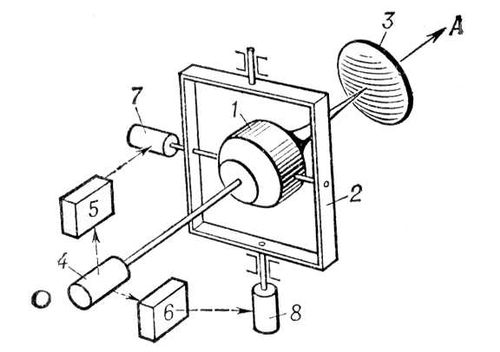
. Применяются в качестве успокоителей бортовой качки корабля, стабилизаторов вагона однорельсовой ж. д. и др. (вес и габариты подобных Г. весьма существенны), а также для стабилизации чувствительных элементов систем управления. Например, Г. (
рис. 1
), состоящий из гирокамеры
1с ротором, установленной в наружном кардановом кольце (раме)
2, осуществляет непосредственную стабилизацию антенны
3и координатора
4. Координатор вырабатывает сигналы, пропорциональные углам отклонения оси антенны от заданного направления
ОА. Эти сигналы через усилители-преобразователи
5и
6— поступают на датчики моментов 7 и
8системы коррекции, осуществляющей автоматическое слежение оси антенны за указанным направлением. Подобные Г. называют гироскопическими следящими системами.
Силовые Г. (гирорамы) — электромеханические устройства, содержащие, кроме гироскопов, специальные двигатели для преодоления воздействия на стабилизируемый объект внешних возмущающих моментов. Применяются на кораблях, летательных аппаратах и др. объектах для стабилизации отдельных приборов и устройств. Кроме того, по принципу силовой гироскопической стабилизации работают некоторые типы гироскопов направления, гировертикалей и комбинированных устройств, называемых гироазимутгоризонтами. Силовые Г. в зависимости от числа гироскопов в раме могут быть одно- и двухгироскопными, а по числу осей стабилизации — одно-, двух- и трёхосными. У одноосного силового Г. с одним гироскопом (
рис. 2
) основным элементами являются гирокамера
1с ротором; рама 2, играющая роль наружного карданова кольца и жестко связанная со стабилизируемым объектом; датчик угла
3, установленный на оси прецессии
Ox; усилитель
4; стабилизирующий двигатель
5, предназначенный для приложения относительно оси стабилизации
Ohмоментов, компенсирующих действующие на раму внешние возмущающие моменты; маятник-корректор
6и датчик моментов 7, являющиеся элементами системы коррекции Г. При действии внешнего возмущающего момента
М, стремящегося повернуть раму вокруг оси
Oh, гирокамера
1по свойствам гироскопа начнёт прецессировать вокруг оси Ox; при этом возникает гироскопический момент
М
г, противодействующий моменту
М. В дальнейшем при повороте гирокамеры вокруг оси
Oxна некоторый угол
bдатчик угла
3через усилитель
4включит стабилизирующий двигатель
5, прикладывающий относительно оси
Ohмомент стабилизации
М
с, противоположный моменту
М. В результате гирокамера начнёт прецессировать в обратном направлении и остановится (при постоянной величине
М) в положении, для которого
М
с+ М = 0. Т. о., в силовом Г. гироскоп осуществляет стабилизацию лишь в первый момент; в дальнейшем её обеспечивает стабилизирующий двигатель, что позволяет стабилизировать значительные массы при сравнительно небольшом весе и габаритах самого гироскопа. На практике применяют также двухгироскопные Г., обладающие рядом преимуществ по сравнению с одногироскопными.
Сочетание двух одноосных Г. даёт двухосный Г., стабилизирующий платформу относительно плоскости горизонта; этот Г. может быть также использован в качестве гировертикали силового типа. Сочетание трёх одноосных Г. даёт трёхосный силовой гиростабилизатор (гироазимутгоризонт) — устройство, состоящее из гироскопа направления (гироазимута) и гировертикали (гирогоризонта). Он служит для измерения трёх углов, определяющих положение объекта, и применяется на кораблях и самолётах. Трёхосный Г. используется также для пространственной стабилизации некоторой платформы (гиростабилизированная платформа). Подобные Г. применяют в
.
Индикаторные Г. — системы автоматического регулирования, в которых гироскопические устройства, установленные на стабилизируемом объекте (например, платформе), являются чувствительными или задающими элементами, определяющими положение объекта и управляющими следящими системами; стабилизация же объекта (платформы) осуществляется с помощью следящих систем. В качестве чувствительных элементов, реагирующих на угловые скорости или углы отклонения платформы, применяют двухстепенные (например, поплавковые интегрирующие) гироскопы и гиротахометры или трёхстепенные астатические гироскопы. Индикаторные Г. используют в инерциальных навигационных системах, устанавливаемых на кораблях и летательных аппаратах.
А. Ю. Ишлинский, С. С. Ривкин.
Рис. 2. Принципиальная схема одноосного силового гиростабилизатора с одним гироскопом: 1 — гирокамера с ротором; 2 — рама; 3 — датчик угла; 4 — усилитель; 5 — стабилизирующий двигатель; 6 — маятник-корректор; 7 — датчик моментов; Oxhz — оси системы отсчёта; Охуz — оси, связанные с гирокамерой; Ox — ось прецессии; Oh — ось стабилизации; a — погрешность стабилизации; b — угол прецессии.
Рис. 1. Принципиальная схема гироскопической следящей системы: 1 — гирокамера с ротором; 2 — наружное карданово кольцо (рама); 3 — антенна; 4 — координатор; 5, 6 — усилители-преобразователи; 7, 8 — датчики моментов.
Гиростабилизированная платформа
Гиростабилизи'рованная платфо'рма, гироскопическое устройство для пространственной стабилизации каких-либо объектов или приборов, а также для определения углов поворота основания, на котором установлена Г. п. Подробнее см.
.
Гиротахометр
Гиротахо'метр, указатель угловой скорости, прецессионный, или скоростной, гироскоп, датчик угловой скорости,
для определения угловой скорости объекта, на котором оно установлено. Наиболее распространены Г., основанные на использовании двухстепенного астатического
. В таком Г. (
рис.
) ротор
1гироскопа установлен в кардановом кольце (рамке) 2, поворот которого ограничивается пружиной
3, создающей восстанавливающий момент. Погашение собственных колебаний гироскопа осуществляется демпфером
4.
При вращении объекта вокруг оси
Oz, (входная ось) с некоторой угловой скоростью
w
zрамка повернется вокруг оси
Oh(выходная ось) на угол
b, связанный с
w
zравенством:
b = w
zH/c, где
Н— кинетический момент гироскопа,
с— коэффициент, зависящий от жёсткости пружины и места её крепления. Значения
bснимаются с потенциометра
5и по ним определяется искомая величина
w
z. Порог чувствительности Г. к угловой скорости объекта измеряется десятыми долями градуса в
сек. Существуют и более точные Г., в которых используется поплавковый подвес (см.
).
Г. применяются на летательных аппаратах в качестве указателей поворотов и чувствительных элементов систем автоматической стабилизации. На кораблях Г. применяют в успокоителях качки и в др. системах. Возможно использование Г. и в
.
Существуют также приборы, называемые гиротахоакселерометрами, определяющие одновременно и угловую скорость, и угловое ускорение объекта. В них используется астатический гироскоп с 3 степенями свободы. Подобные приборы применяют, например, в
самолётов.
А. Ю. Ишлинский, С. С. Ривкин.
Принципиальная схема гиротахометра: 1 — ротор; 2 — карданово кольцо; 3 — пружина; 4 — демпфер; 5 — потенциометр; Oxhz — оси системы отсчёта, Охуz — оси, связанные с кардановым кольцом.
Гиротеодолит
Гиротеодоли'т, гироскопическое визирное устройство, предназначенное для ориентирования туннелей, шахт, топографической привязки и др. Г. служит для определения азимута (пеленга) ориентируемого направления и широко используется при проведении маркшейдерских, геодезических, топографических и др. работ. По принципу действия Г. является гирокомпасом и принадлежит к типу наземных гирокомпасов. Некоторые Г. построены на базе мореходных гирокомпасов. Ряд схем Г. выполнен на принципе гирокомпаса Фуко (см.
), т. е. в них использован двухстепенной астатический
. Для уменьшения моментов трения и др. возмущающих воздействий в подобных Г. применены воздушные, жидкостные, торсионные и др. подвесы. Помимо гироскопического чувствительного элемента, Г. включает угломерное устройство для снятия отсчётов положения чувствительного элемента и определения азимута (пеленга) ориентируемого направления. Угломерное устройство состоит из
и автоколлимационной трубы, жестко связанной с его
. Т. к. ось гироскопа совершает колебания относительно плоскости меридиана, то направление истинного меридиана в Г. определяется путём наблюдения при помощи автоколлимационной трубы точек реверсии чувствительного элемента (максимальные отклонения оси гироскопа от истинного меридиана) и их осреднения. Наблюдение ведётся по штриху, проектируемому на зеркале, которое укреплено на чувствительном элементе. При этом визирная линия автоколлимационной трубы будет располагаться параллельно оси гироскопа. Определение азимута (пеленга), ориентируемого с помощью Г. направления, производится по шкале, связанной с теодолитом. Г. обладают высокой точностью (погрешности от единиц угловых минут до нескольких единиц угловых секунд).