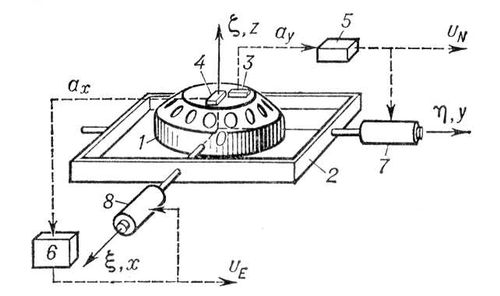
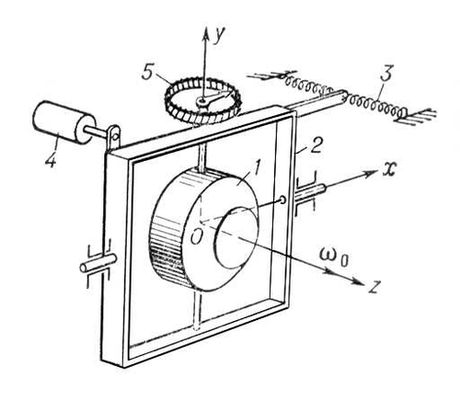
Шулера. Гироинерциальная вертикаль состоит из астатического трёхстепенного гироскопа, на гирокамере 1 которого расположены акселерометры 3, 4 (в реальных схемах акселерометры устанавливают на гиростабилизированной платформе). Измеряемые акселерометрами кажущиеся ускорения
a
xи
a
yобъекта вдоль горизонтальных осей
Охи
Оупоступают в интеграторы 5, 6; их выходные сигналы (скорости
v
Eи
v
Nвдоль осей
Охи
Оу) вводятся на датчики моментов 7, 8, прикладывающие к гироскопу моменты коррекции, которые вызывают прецессию оси гироскопа
Ozк вертикали. При соответствующем выборе коэффициенты пропорциональности между сигналом с интегратора и величиной момента коррекции период прецессии оказывается равным периоду Шулера. Благодаря этому устройство обладает высокой точностью при маневрировании объекта и его погрешности не превосходят несколько угловых минут. Гироинерциальные вертикали широко используются в
, устанавливаемых на кораблях и летательных аппаратах.
А. Ю. Ишлинский, С. С. Ривкин.
Рис. 3. Принципиальная схема гироинерциальной вертикали: 1 — гирокамера с ротором; 2 — наружное карданово кольцо; 3, 4 — акселерометры; 5, 6 — интеграторы; 7, 8 — датчики моментов.
Рис. 1. Принципиальная схема гировертикали с маятниковой коррекцией: 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца: 4, 5 — маятники-корректоры; 6, 7 — датчики моментов; 8, 9 — потенциометры.
Рис. 2. Принципиальная схема гиромаятника: 1 — гирокамера с ротором; 2 — наружное карданово кольцо.
Гировоз
Гирово'з, рудничный локомотив с механическим аккумулятором энергии, предназначенный для перемещения вагонеток в шахтах. Г. начали применять в Европе в 40-х гг. 20 в., после освоения их серийного производства швейцарской фирмой «Эрликон»; в СССР выпуск Г. осуществляется с 50-х гг. Для движения поезда в Г. используется энергия, накопленная вращающимся маховиком, раскручивание которого (до 2—3 тыс.
об/ мин) осуществляется электрическим или пневматическим двигателем установленным на Г. или на стационарном зарядном пункте. В конструкции Г. предусмотрено ступенчатое или бесступенчатое (например, с помощью гидропередачи) регулирование скорости движения. Длина пробега Г. после однократной зарядки не превышает обычно 3—5
км. В основном Г. используются для транспортирования небольших составов по вентиляционным выработкам и при строительстве шахт, а также в качестве вспомогательного транспорта в гидрошахтах и шахтах сплошной конвейеризации.
А. А. Пархоменко.
Илл. к ст. Гировоз.
Гирогоризонт
Гирогоризо'нт, то же, что
.
Гироинерциальная вертикаль
Гироинерциа'льная вертика'ль, один из типов
.
Гирокастра
Гирока'стра, Гьинокастер, Гьирокастра (Gjirokastra), город на Ю. Албании, в долине р. Дрино. 15,6 тыс. жителей (1967). Узел шоссейных дорог. Пищевые, табачные, кожевенные, металлообрабатывающие предприятия. Основан в 4 в. В 14 в.. вероятно, принадлежал Венеции, с 1460 до начала 20 в. — Турции. Архитектурные памятники: венецианская крепость (известна с 14 в.), средневековая жилая застройка по склонам холмов — 2—3-этажные каменные дома-крепости (кула) с глухими нижними этажами, нависающими крышами и окнами, снабженными решётками. Собор 18 в. Мечети начала 18 в. Близ Г. — церковь Лабове-э-Крюки (10—11 вв.).
Гирокомпас
Гироко'мпас, механический указатель направления истинного (географического) меридиана, предназначенный для определения курса объекта, а также азимута (пеленга) ориентируемого направления. Преимущества Г. по сравнению с магнитным
состоят в том, что он указывает направление географического (а не магнитного) меридиана, что на его показания существенно меньше, чем на магнитный компас, влияют перемещающиеся металлические массы (железо, сталь) и электромагнитные поля и что его точность в условиях маневрирования и колебаний объекта значительно выше. Принцип действия Г. основан на использовании свойств гироскопа и суточного вращения Земли; его идея была предложена французским учёным Л. Фуко.
Гирокомпас Фуко представляет собой двухстепенной астатический
, ось которого перемещается в плоскости горизонта и благодаря возникающему из-за вращения Земли гироскопическому моменту стремится совместиться с плоскостью меридиана. Г. Фуко не нашёл применения на подвижных объектах, подверженных колебаниям, но его идея была использована при разработке некоторых образцов наземных Г.
На подвижных объектах широко применяются одно- и двухроторные Г., основанные на использовании трёхстепенных гироскопов.
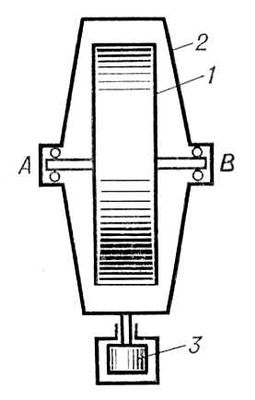
В однороторном мореходном Г. используется трёхстепенной гироскоп, центр тяжести которого смещен в его экваториальной плоскости ниже точки подвеса, т. е. позиционный гироскоп. В зависимости от способа создания маятникового эффекта различают Г. с маятником, Г. с ртутными сосудами, Г. с косвенной коррекцией. В Г. с маятником (
рис. 1
) ротор
1заключён в гирокамеру
2, к нижней части которой подвешен груз
3. Гирокамера установлена в наружном кардановом кольце (на
рис.
не показано), ось вращения которого расположена вертикально. Когда ось
АВротора не находится в плоскости меридиана (отклонена на Восток или на Запад), она, стремясь в соответствии со свойствами трёхстепенного гироскопа сохранять своё направление по отношению к звёздам, будет вследствие вращения Земли отклоняться от плоскости горизонта (например, её конец
В, если он отклонен к Востоку, будет приподниматься, как бы следя за восхождением звёзд). Вместе с осью
ABбудет отклоняться и гирокамера
2с грузом
3относительно плоскости горизонта. В результате относительно точки подвеса возникнет момент силы тяжести, который вызовет прецессионное движение оси
АВк плоскости меридиана. В своём движении ось
АВ«проскочит» плоскость меридиана и тогда под действием момента силы тяжести она начнёт прецессировать в обратном направлении и т.д. После погашения этих
Аколебаний специальным демпфером ось
АВустанавливается в плоскости меридиана.
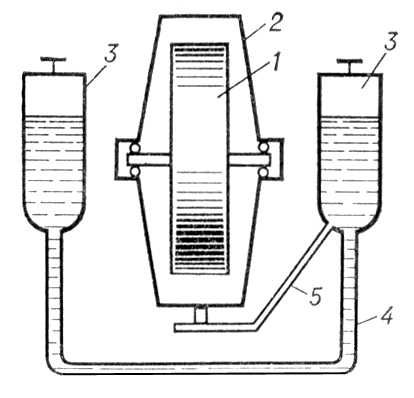
В Г. с ртутными сосудами (
рис. 2
) ротор
1и гирокамера
2отбалансированы так, что их общий центр тяжести совмещен с точкой подвеса. С гирокамерой связана система сообщающихся сосудов
3, частично заполненных ртутью. К правому сосуду прикреплена т. н. лапа
5, связывающая сосуды с гирокамерой. При отклонении оси гироскопа от плоскости горизонта избыток ртути в одном из сосудов обусловливает приложение к гироскопу момента силы тяжести, аналогичного соответствующему моменту в Г. с маятником.
В Г. с косвенной коррекцией используется трёхстепенной астатический гироскоп, на гирокамере которого установлен маятник (акселерометр), фиксирующий угол отклонения оси гироскопа от плоскости горизонта. На основании информации об этом угле в приборе формируются сигналы моментов коррекции, которые прикладываются к гироскопу с помощью соответствующих датчиков моментов, установленных на осях карданова подвеса гироскопа. Подобные приборы могут также работать в режиме гироскопа направления.
Из однороторных Г. применяются в основном Г. с ртутными сосудами.
Двухроторный Г. Чувствительный элемент этого Г. (
рис. 3
) — гиросфера, или поплавок, представляет собой полую сферу
1. В гиросфере помещены гироскопы
2и
3, гидравлический успокоитель для погашения собственных колебаний и др. элементы. Оси собственного вращения гироскопов
2и
3расположены горизонтально, а оси прецессии — вертикально и связаны с шарнирным механизмом спарником
4, который соединён пружинами
5с корпусом гиросферы. В исходном положении (при невращающихся роторах) оси гироскопов составляют с направлением
NSгиросферы равные углы
Е=45°. Центр тяжести гиросферы находится на её вертикальной оси ниже её геометрического центра, что обеспечивает, как и в однороторном Г., необходимый маятниковый момент. Гиросфера помещена в жидкость и поэтому в подвесе имеет место лишь вязкое трение. Для обеспечения невозмущаемости Г. ускорениями объекта параметры системы подбирают так, чтобы период прецессионных колебаний гиросферы при отсутствии затухания составлял 84,4
мин. Наличие в Г. двух гироскопов существенно снижает погрешности прибора при качке корабля. Погрешности Г. при прямом курсе и постоянной скорости хода корабля не превышают нескольких десятых долей градуса. Г. весьма широко распространены на кораблях морского флота.
Разновидность Г. — гирогоризонт-компас, предназначенный для определения курса корабля и углов отклонения его относительно плоскости горизонта.
А. Ю. Ишлинский, С. С. Ривкин.
Рис. 2. Принципиальная схема чувствительного элемента однороторного гирокомпаса с ртутными сосудами: 1 — ротор; 2 — гирокамера; 3 — сосуды с ртутью; 4 — соединительная трубка; 5 — лапа.
Рис. 1. Принципиальная схема чувствительного элемента однороторного гирокомпаса с маятником: 1 — ротор; 2 — гирокамера; 3 — груз.
Рис. 3. Принципиальная схема чувствительного элемента двухроторного гирокомпаса. NS и WE — направления север — юг и восток — запад; H
1, H
2— кинетические моменты гироскопов; 1 — гиросфера; 2, 3 — гироскопы; 4 — спарник; 5 — пружины.
Гирокотилиды
Гирокотили'ды(Gyrocotyloidea), класс плоских паразитических червей, занимающий промежуточное положение между
и
. Длина тела обычно 2—3
см, реже до 10
см. 5 видов (самостоятельность некоторых видов оспаривается); обитают в спиральном клапане (в кишечнике) глубоководных рыб —
; встречаются в различных районах Мирового океана. Для Г. характерны: отсутствие кишечника и наличие сложно устроенного розетковидного органа прикрепления на заднем конце тела. Из овального яйца, снабженного ножкой, развивается личинка —т. н. люкофора, с десятью одинаковыми крючками на заднем конце. Цикл развития, по-видимому, прямой. Многие относят Г. к подклассу цестодарий класса ленточных червей; некоторые считают их сильно видоизменившимися моногенетические сосальщиками.
Лит.:Быховский Б. Е., Онтогенез и филогенетические взаимоотношения плоских паразитических червей, «Изв. АН СССР. Серия биологическая», 1937, т. 4, с. 1353—82; Шульц О. С., Гвоздев Е. В., Основы общей гельминтологии, М., 1970.
Б. Е. Быховский.
Гиромагнитная частота
Гиромагни'тная частота', частота обращения свободного электрона (или иона) в ионизированном газе (плазме) вокруг силовых линий постоянного магнитного поля. На заряженную частицу, движущуюся с постоянной скоростью
V, направленной перпендикулярно магнитному полю
Н
0, действует
:

где
е— заряд электрона,
с— скорость света. Под действием силы
F^
V(
) частица движется по окружности, причём частота обращения не зависит от её скорости, а определяется массой частицы
mи величиной магнитного поля
Н
0:

Г. ч. для земной
~ 1,4
Мгц, для солнечной короны ~ 10
4
Мгц.
Г. ч. играет существенную роль в вопросах распространения электромагнитных волн в плазме, находящейся в постоянном магнитном поле, в частности при
в ионосфере (см. также
).
М. Б. Виноградова.
Гиромагнитное отношение
Гиромагни'тное отноше'ние, отношение магнитного момента атомных частиц (электронов, протонов, нейтронов, атомных ядер и т.д.) к их моменту количества движения. Подробнее см.
.
Гиромагнитные явления
Гиромагни'тные явле'ния, эффекты, в которых проявляется связь между магнитными моментами и моментами количества движения частиц вещества. Подробнее см.
.
Гиромагнитный компас
Гиромагни'тный ко'мпас,
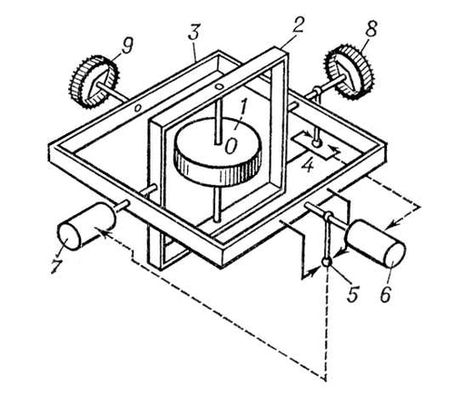
, применяемое на движущихся объектах и предназначенное для определения курса объекта по отношению к плоскости магнитного меридиана. Г. к. представляет собой трёхстепенной астатический
, снабженный азимутальной и горизонтальной системами коррекции; азимутальная коррекция, чувствительным элементом которой является магнитная стрелка, удерживает ось гироскопа
1в плоскости магнитного меридиана; горизонтальная коррекция удерживает внутреннее карданово кольцо
2в положении, перпендикулярном наружному
3. Горизонтальная система коррекции состоит из потенциометра
5(
рис.
) и датчика моментов
8. Азимутальная система коррекции состоит из магнитной стрелки
6, потенциометра
4и датчика моментов 7. Принцип работы систем коррекции Г. к. аналогичен таковому в
с маятниковой коррекцией. Погрешность Г. к. может достигать нескольких градусов. Прибор широко распространён в авиации, применяется также в морском флоте.
Если магнитная система установлена вдали от гироскопа, то связь между ними осуществляется с помощью следящей системы (дистанционный Г. к.). Существуют приборы, у которых вместо магнитной системы применяется индукционный чувствительный элемент. Это т. н. гироиндукционный компас. У него, в отличие от Г. к., отсутствует азимутальный гироскоп и показания магнитного курса определяются с помощью индукционного чувствительного элемента, состоящего из пермаллоевого сердечника с обмоткой, ось которого устанавливается в плоскости магнитного меридиана. Для повышения точности прибора индукционный элемент стабилизируется относительно плоскости горизонта установкой его на гирокамере гировертикали.
А. Ю. Ишлинский, С. С. Ривкин.
Принципиальная схема гиромагнитного компаса: 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца; 4, 5 — потенциометры; 6 — магнитная стрелка; 7, 8 — датчики моментов.
Гиромаятник
Гирома'ятник, один из типов
.
Гироорбитант
Гироорбита'нт, гироорбита, гиробинормаль,
для определения угла рыскания (отклонения от плоскости орбиты) искусственного спутника Земли. Г. представляет собой трёхстепенной астатический
, у которого относительно оси вращения наружного карданова кольца приложен вводимый пружинами восстанавливающий момент, а также момент демпфирования. Г. по принципу действия схож с маятниковым
, но роль маятника в нём выполняют пружины. Прибор (см.
рис.
) устанавливается на спутнике, который по сигналам от индикатора вертикали стабилизируется относительно местной вертикали. При этом, если угол рыскания спутника равен нулю, то ось вращения наружного карданова кольца
2располагается по касательной к орбите, а ось
Ozгироскопа — по нормали к ней. При отклонении оси гироскопа от указанного направления, вследствие того что движение спутника по орбите представляет собой вращение с угловой скоростью
w
0вокруг оси, перпендикулярной к плоскости орбиты, и вследствие наличия пружин
3, возникают моменты, стремящиеся совместить ось
Ozгироскопа с вектором
w
0; это направление оси является устойчивым. При возникновении у спутника угла рыскания плоскость наружного карданова кольца
2выходит из совмещения с плоскостью орбиты и с потенциометра
5, установленного на оси вращения гирокамеры
1, снимается угол рыскания спутника. Существуют др. схемы Г., близкие к схеме гирокомпаса с косвенной коррекцией. При этом сигнал для системы коррекции формируется на основании показаний индикатора вертикали, установленного на борту спутника. Г. широко используют в качестве курсового прибора, с помощью которого спутник ориентируется по азимуту относительно орбитальной системы координат.
А. Ю. Ишлинский, С. С. Ривкин.
Принципиальная схема гироорбитанта. Oxyz — система координат, связанная с гирокамерой: 1 — гирокамера с ротором; 2 — наружное карданово кольцо; 3 — пружина; 4 — демпфер; 5 — потенциометр.
Гироориентатор
Гироориента'тор,
, предназначенное в общем случае для определения местоположения объекта и параметров его движения. Г. основан на использовании гироскопов в сочетании с акселерометрами и вычислительным устройством. Основные части Г. — гироинерциальная вертикаль (см.
), которая воспроизводит вертикаль места (плоскость горизонта) и определяет составляющие линейной скорости объекта, а также гироазимут (см.
), осуществляющий азимутальную ориентацию акселерометров. Г. совместно с вычислительным устройством, устройствами коррекции от источников внешней информации (измерители скорости и координат) и др. приборами образуют
. Иногда под Г. понимают непосредственно инерциальную навигационную систему. Г. может определять координаты местоположения объекта (широту, долготу и др.) и параметры его движения (курс, скорость, высоту полёта, углы атаки, скольжения и др.).
А. Ю. Ишлинский, С. С. Ривкин.
Гирополукомпас
Гирополуко'мпас, гироскопическое устройство для определения углов рыскания (изменения курса) и углов поворота объекта вокруг вертикальной оси, см.
.
Гирорулевой
Гирорулево'й, то же, что
.
Гироскоп
Гироско'п(от
и
), быстро вращающееся твёрдое тело, ось вращения которого может изменять своё направление в пространстве. Г. обладает рядом интересных свойств, наблюдаемых у вращающихся небесных тел, у артиллерийских снарядов, у детского волчка, у роторов турбин, установленных на судах, и др. На свойствах Г. основаны разнообразные устройства или приборы, широко применяемые в современной технике для автоматического управления движением самолётов, морских судов, ракет, торпед и др. объектов, для определения горизонта или географического меридиана, для измерения поступательных или угловых скоростей движущихся объектов (например, ракет) и многое др.
Свойства Г. проявляются при выполнении двух условий: 1) ось вращения Г. должна иметь возможность изменять своё направление в пространстве; 2) угловая скорость вращения Г. вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Простейшим Г. является детский волчок, быстро вращающийся вокруг своей оси
ОА(
рис. 1
); ось
ОАможет изменять своё положение в пространстве, поскольку её конец
Ане закреплен. У Г., применяемых в технике, свободный поворот оси Г. можно обеспечить, закрепив сё в рамках (кольцах) 1,
2т. н. карданова подвеса (
рис. 2
), позволяющего оси
АВзанять любое положение в пространстве. Такой Г. имеет 3 степени свободы: он может совершать 3 независимых поворота вокруг осей
АВ,
DEи
GK, пересекающихся в центре подвеса О, который остаётся по отношению к основанию
3неподвижным. Если центр тяжести Г. совпадает с центром О, то Г. называется астатическим (уравновешенным), в противном случае — тяжёлым.
Первое свойство уравновешенного Г. с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей. Впервые это свойство Г. использовал французский учёный Л. Фуко для экспериментального доказательства вращения Земли вокруг её оси (1852). Отсюда и само название «Г.», что в переводе означает «наблюдать вращение».
Второе свойство Г. обнаруживается, когда на его ось (или рамку) начинают действовать сила или пара сил, стремящиеся привести ось в движение (т. е. создающие вращающий момент относительно центра подвеса). Под действием силы
Р(
рис. 3
) конец
Аоси
АВГ. будет отклонять не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе; в результате Г. вместе с рамкой 1 начнёт вращаться вокруг оси
DE, притом не ускоренно, а с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси
АВсам Г. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось
АВмгновенно остановится, т. е. прецессионное движение Г. безынерционно.
Величина угловой скорости прецессии определяется по формуле:

где
М— момент силы
Рцентра О, a = б
АОЕ, W — угловая скорость собственного вращения Г. вокруг оси
АВ,
I— момент инерции Г. относительно той же оси,
h = АО— расстояние от точки приложения силы до центра подвеса Г.; второе равенство имеет место, когда сила
Рпараллельна оси
DE. Из формулы (1) непосредственно видно, что прецессия происходит тем медленнее, чем больше W, точнее, чем больше величина
H=
IW, называется собственным кинетическим моментом Г. Как найти направление прецессии Г. см.
рис. 4
.
Наряду с прецессией ось Г. при действии на неё силы может ещё совершать т. н. нутацию — небольшие, но быстрые (обычно незаметные на глаз) колебания оси около её среднего направления. Размахи этих колебаний у быстро вращающегося Г. очень малы и из-за неизбежного наличия сопротивлений быстро затухают. Это позволяет при решении большинства технических задач пренебречь нутацией и построить т. н. элементарную теорию Г., учитывающую только прецессию, скорость которой определяется формулой (1). Прецессионное движение можно наблюдать у детского волчка (
рис. 5
, а), для которого роль центра подвеса играет точка опоры О. Если ось такого волчка поставить под углом
АОЕк вертикали и отпустить, то она под действием силы тяжести
Рбудет отклоняться не в сторону действия этой силы, т. е. не вниз, а в перпендикулярном направлении, и начинает прецессировать вокруг вертикали. Прецессия волчка также сопровождается незаметными на глаз нутационными колебаниями, быстро затухающими из-за сопротивления воздуха. Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии
wсоответственно возрастает. Когда угловая скорость вращения волчка становится меньше определенной величины, он теряет устойчивость и падает. У медленно вращающегося волчка нутационные колебания могут быть довольно заметными и, слагаясь с прецессией, существенно изменить картину движения оси волчка: конец
Аоси будет описывать ясно видимую волнообразную или петлеобразную кривую, то отклоняясь от вертикали, то приближаясь к ней (
рис. 5
, б).
Другой пример прецессионного движения даёт артиллерийский снаряд (или пуля). На снаряд при его движении, кроме силы тяжести, действуют силы сопротивления воздуха, равнодействующая
Rкоторых направлена примерно противоположно скорости центра тяжести снаряда и приложена выше центра тяжести (
рис. 6
, а). Невращающийся снаряд под действием силы сопротивления воздуха будет «кувыркаться» и его полёт станет беспорядочным (
рис. 6
, б); при этом значительно возрастет сопротивление движению, уменьшится дальность полёта и снаряд не попадёт в цель головной частью. Вращающийся же снаряд обладает всеми свойствами Г., и сила сопротивления воздуха вызывает отклонение его оси не в сторону действия этой силы, а в перпендикулярном направлении. В результате ось снаряда медленно прецессирует вокруг прямой, по которой направлена скорость
v
c, т. е. вокруг касательной к траектории центра тяжести снаряда (
рис. 6
, в), что делает полёт правильным и обеспечивает на нисходящей ветви траектории попадание снаряда в цель головной частью.
Наша планета Земля также является гигантским Г., совершающим прецессию (подробнее см.
в астрономии).
Если ось
АВротора Г. закрепить в одной рамке, которая может вращаться по отношению к основанию прибора вокруг оси
DE(
рис. 7
), то Г. будет иметь возможность участвовать только в двух вращениях — вокруг осей
АВи
DE, т. е. будет иметь две степени свободы. Такой Г. не обладает ни одним из свойств Г. с тремя степенями свободы, однако у него есть другое очень интересное свойство: если основанию Г. сообщить вынужденное вращение с угловой скоростью
wвокруг оси
KL, образующей угол
aс осью
АВ, то на ось ротора со стороны подшипников
Аи
Вначнёт действовать пара сил с гироскопическим моментом
М
гир=
IWw sin a. (2)
Эта пара стремится кратчайшим путём установить ось ротора Г. параллельно оси
KL, причём так, чтобы и вращение ротора, и вынужденное вращение были видны происходящими в одну и ту же сторону.
Рассмотрим, наконец, ротор, ось
АВкоторого непосредственно закреплена в основании
D(
рис. 8
). Если это основание неподвижно, то ось не может изменять своё направление в пространстве и, следовательно, ротор никакими свойствами Г. не обладает. Однако если вращать основание вокруг некоторой оси
KLс угловой скоростью
w, то по предыдущему правилу ось
АВбудет стремиться установиться параллельно оси
KL. Этому движению препятствуют подшипники, в которых закреплена ось. В результате ротор будет давить на подшипники
Аи
Вс силами
F
1
и
F
2, называемыми гироскопическими силами.
На морских судах и винтовых самолётах имеется много вращающихся частей: вал двигателя, ротор турбины или динамомашины, гребные или воздушные винты и т.п. При разворотах самолёта или судна, а также при качке на подшипники, в которых укреплены эти вращающиеся части, действуют указанные гироскопические силы и их необходимо учитывать при соответствующих инженерных расчётах; величины этих сил могут достигать нескольких тонн, и, если крепления подшипников не будут должным образом рассчитаны, то произойдёт авария.
Теория Г. является важнейшим разделом
твёрдого тела, имеющего неподвижную точку. Перечисленные свойства Г. представляют собой следствия законов, которым подчиняется движение такого тела. Первое из свойств Г. с тремя степенями свободы есть проявление закона сохранения кинетического момента, а второе свойство — проявление одной из теорем динамики, согласно которой изменение во времени кинетического момента тела равно моменту действующей на него силы.
Гироскопы в технике.Применяемые в технике Г. выполняют обычно в виде маховичка с утолщённым ободом, весом от нескольких
Гдо десятков
кГ, закрепленного в кардановом подвесе. Чтобы сообщить Г. быстрое вращение, его делают ротором быстроходного электромотора постоянного или переменного тока. В авиации применяются Г. с ротором в виде воздушной турбинки, приводимой в движение струей воздуха. Иногда Г. выполняют в форме шара (шар-Г.) с подвесом на воздушной плёнке, образуемой подачей сжатого воздуха. В ряде конструкций применяют поплавковый Г., ротор которого заключён в кожух, плавающий в жидкости; этим разгружаются подшипники кожуха и значительно уменьшается момент трения в них.
Устройство конкретных гироскопических приборов основывается на тех или иных свойствах Г. с тремя или двумя степенями свободы. Свойство Г. с тремя степенями свободы неизменно сохранять направление своей оси в пространстве используется при конструировании приборов для автоматического управления движением самолётов (например,
), ракет, морских судов, торпед и т.п. Г. в этих приборах играет роль чувствительного элемента, регистрирующего отклонение движущегося объекта от заданного курса. Одновременно прибор содержит следящую систему, улавливающую сигнал об отклонении, усиливающую его и передающую силовому устройству (мотору), которое и возвращает объект на заданный курс, обычно с помощью рулей. Второе свойство Г. с тремя степенями свободы — свойство прецессировать под действием приложенной силы — положено в основу Г. направления (курсового Г.) и важных навигационных приборов:
— прибора, определяющего направление географического меридиана, и гировертикали (или гирогоризонта) — прибора, определяющего направление истинной вертикали (горизонта).
При запуске ракеты необходимо с высокой степенью точности знать скорость её вертикального взлёта. С этой, казалось бы, очень трудной задачей, тоже легко справляется прецессирующий Г.
В гироскопических приборах часто используют и свойства Г. с двумя степенями свободы. К таким приборам относятся авиационный
, а также некоторые виды
, в частности устройства для пространственной стабилизации объекта (например, искусственного спутника Земли). Подробнее о всех этих и др. устройствах см.
.
Современная техника требует от многих гироскопических приборов очень высокой точности, что вызывает большие технологические трудности при их изготовлении. Например, у некоторых приборов при весе ротора порядка 1
кГдля обеспечения нужной точности смещение центра тяжести от центра подвеса не должно превышать долей микрона, иначе момент силы тяжести вызовет нежелательную прецессию (уход) оси Г. Кроме того, на точность показаний приборов с Г. в кардановом подвесе влияет трение в осях. Всё это привело к разработке Г., основанных не на чисто механических, а на других физических принципах (см. также
,
).