 |
|
Популярные авторы:: Чехов Антон Павлович :: БСЭ :: Борхес Хорхе Луис :: Нортон Андрэ :: Сименон Жорж :: Лондон Джек :: Азимов Айзек :: Толстой Лев Николаевич :: Грин Александр :: Петрушевская Людмила Популярные книги:: The Boarding House :: Бурый волк :: Зовите меня Джо :: Жил-был щелкунчик :: Великие неторопливые короли :: Жар небес :: Цивилизация каннибалов :: Парк-авеню 79 :: Авторитет :: Впечатления |
Компьютерра (№255) - Журнал «Компьютерра» № 6 от 14 февраля 2006 годаModernLib.Net / Компьютеры / Компьютерра / Журнал «Компьютерра» № 6 от 14 февраля 2006 года - Чтение (стр. 4)
Теперь рассмотрим двуглазого робота, который для определения расстояния до предметов использует бинокулярное зрение. Тут возможны два случая: или заранее известно взаимное расположение камер (они закреплены жестко), или потребуется определять положение камер. С первым случаем, казалось бы, все просто: берем точку на одном кадре, ищем соответствующую ей на другом и определяем расстояние до камер. Но все как раз и упирается в поиск соответствий между точками. Для некоторых областей изображения таких соответствий может не оказаться — например, одна из пары соответствующих точек будет чем-то загорожена. Но даже если все соответствия имеются, то найти их будет очень не просто. Рассмотрим простейший случай: наш двуглазый робот смотрит на кубик с гладкими однотонными стенками, и как бы мы ни старались и не разглядывали изображения, полученные с каждого из глаз, найти соответствующих пар точек больше, чем углов у кубика, невозможно. А даже по восьми точкам (предположим, что видны все углы) пытаться восстановить сцену, не зная, что на ней куб, задача нереальная. Калибровка камеры Большинство оптических методов разрабатываются в расчете на центрально проецирующие камеры. Напомню, что при такой проекции прямые остаются прямыми, а если мы посмотрим на снимки, сделанные реальными фотоаппаратами, то увидим, что зачастую прямые линии выгибаются от центра кадра (особенно по краям). Эти недостатки свойственны камерам с небольшим объективом, а именно такие и устанавливаются на большинство роботов. Естественно, если искажения на кадре будут столь заметны, то восстановить по ним 3D с хорошей точностью не удастся. Чтобы можно было бороться с этой проблемой, применяется процедура калибровки камеры. Если в модели центральной проекции камера имеет всего один параметр (фокусное расстояние), то в реальности к нему добавляется несколько параметров (их число зависит от выбранной модели), описывающих свойства «бочки». Далее фотографируют что-то с заранее известной структурой (это может быть шахматная доска, или решетка, или лист бумаги с нанесенными в определенных местах точками) и по полученному кадру определяют параметры камеры. Теперь любой кадр, сделанный ею, можно с достаточно хорошей точностью привести к виду, соответствующему центральной проекции. И уже преобразованный таким образом кадр использовать для алгоритмов восстановления 3D. Какие есть пути решения данной проблемы? Можно искать на изображениях соответствия не только точек, но и прямых и эллипсов (проекция окружности). Ведь роботы скорее всего будут находиться в антропогенной среде, а современные офисные интерьеры и городские пейзажи практически полностью состоят из прямых линий, да и окружности встречаются нередко. Вернемся к примеру с кубом. Пусть нам удалось найти соответствия между углами, тогда отыскать отрезки, соединяющие углы, и разбить их на пары соответствия, тоже не составит труда. Далее можно сделать предположение, что четыре отрезка, образующих замкнутую ломаную, ограничивают плоскость[Оглянитесь вокруг, и вы увидите, что чаще всего так и бывает]. Вот наша задача и решена! Теперь мы можем построить тот самый куб, составив его из плоскостей. Если наш робот наткнется на кружку или кастрюлю, он без труда распознает в ее основании окружность, что поможет ему «разобраться» и с формой этого предмета. Но иногда жестко закреплять глаза робота нецелесообразно или вообще ненужно, поскольку восстановить положение камер по двум снимкам не слишком трудно. К тому же это решение зачастую дает более высокую точность, нежели механическое соединение камер. Да и возможность независимо оперировать двумя глазами довольно заманчива, особенно в тех задачах, где не требуется восприятие трехмерной информации (например, такой робот сможет одновременно читать две страницы книги).  Так как же восстанавливают положение камер по кадрам? Для этого нам опять потребуются пары соответствующих точек на каждом из изображений (обычно не меньше семи пар). При смене камеры мы просто меняем центр и направление проецирования; таким образом, пара камер характеризуется вектором сдвига (он соединяет оптические центры камер) и поворотом в пространстве одной относительно другой. Если мы посмотрим на две фотографии одного предмета, сделанные с разных точек, то сможем достаточно точно указать искомые параметры пары камер. При этом мы будем руководствоваться изменением взаимного положения точек на фотографиях. Рассуждать мы будем примерно так: «вот этот отрезок стал длиннее, следовательно, теперь он стал более перпендикулярным по отношению к камере, а вот этот короче, а этот повернулся…». Руководствуясь подобными же соображениями, можно построить математическую модель и с ее помощью достаточно точно восстановить параметры пары камер. После того как взаимное положение камер известно, можно для любой точки одного изображения найти прямую на другом, которая будет проходить через точку, соответствующую в пространстве первой. Эта прямая называется эпиполярной и соответствует проекции (e’p’, см. рис. справа внизу) на вторую камеру прямой (OP), соединяющей точку в пространстве (P) с оптическим центром первой камеры (O). Понятно, что конфигурация эпиполярных линий определяется только параметрами пары камер и не зависит от конфигурации 3D-сцены. После того как построены эпиполярные линии, мы можем искать точку, соответствующую данной, не по всему второму изображению, а только вдоль эпиполярной прямой, что не только сильно снижает вычислительную сложность алгоритма, но и позволяет находить такие соответствия, которые другими методами просто были бы пропущены. Вернемся к примеру с кубом. Пусть у нас уже построены эпиполярные линии и найдены соответствия между вершинами и гранями куба. Теперь мы можем для любой точки на грани куба найти соответствие: строим эпиполярную линию, которая пересечет грань куба на втором изображении в единственном месте, оно-то и будет точкой, соответствующей первой.  Вспомним про третий инструмент человеческого восприятия трехмерного пространства — выявление знакомых предметов со знакомыми размерами. Этот метод применим только для довольно узкого класса задач. Например, индустриальный робот только и делает, что перекладывает пять различных типов заготовок с места на место и вполне может их «узнавать», а вот для ориентирования в произвольном помещении такой метод вряд ли подойдет. Знаменитый робот-собака Aibo может находить и узнавать свои игрушки, но для этого они специальным образом раскрашиваются. Можно и с одной камерой составить представление о трехмерном мире, но для этого роботу придется двигаться и, сохраняя предыдущие кадры в памяти, использовать их аналогично кадрам со второй камеры. При таком алгоритме существенно упрощается поиск парных соответствий. Ведь если сохранять кадры часто, то на двух соседних соответствующие точки будут лежать недалеко друг от друга. Более того, если результат покажется недостаточно точным, можно продолжить движение и уточнить его. Теперь рассмотрим возможности, которые недоступны человеку, но вполне могут быть реализованы в роботах. Существенно увеличить точность восстановления 3D можно, используя третий глаз. Именно так и поступила компания Sony, спроектировав робота Qrio. Правда, он использует третий глаз не только для ориентирования в пространстве, но и для увеличения многозадачности. Все описанные методы являются пассивными — робот не генерирует никаких сигналов. Существуют также и активные системы; некоторые из них сродни эхолотам дельфинов и акустическим радарам летучих мышей. Робот посылает направленную акустическую или электромагнитную волну и по отраженной волне, которую сам и принимает, получает информацию о расстоянии до преграды. Такой аппаратурой обычно оснащаются роботы, действующие на открытой местности, где оптические методы не всегда эффективны (выбрать соответствующие друг другу точки очень трудно из-за сложной формы объектов и обилия сильно текстурированных областей). 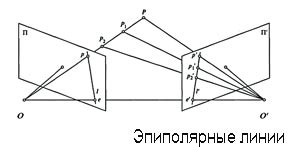 Рассмотрим системы с оптической подсветкой. Если установить на робота одну камеру и лазер, который создает яркое пятнышко на поверхности предметов, то по скорости перемещения пятна можно судить о дистанции до предмета, а по ускорению — о наклоне поверхности (при наличии двух или более камер). Таким образом, можно «прощупать» лазером все поле зрения робота. Но согласитесь, многим не понравится, если механический курьер в офисе будет всюду шарить лазером. Впрочем, можно взять лазер, излучающий в невидимом диапазоне. Еще более изящное решение — использовать структурированную подсветку. Все поле зрения робота засвечивается лазерной решеткой, и расстояние до преграды определяется по шагу решетки на кадре: чем он больше — тем и расстояние больше. Такие системы не смогут работать с зеркальными поверхностями, но согласитесь, что в стеклянном лабиринте не сможет сориентироваться даже человек, поэтому всерьез этот недостаток воспринимать не следует. В существующих системах обычно используются несколько методов. Ведь в условиях, неблагоприятных для одного из них, другой может дать неплохие результаты, а одновременное применение разных методов позволяет сильно уменьшить вероятность ошибки. Система зрения робомобиля Stanley  Гонку робомобилей DARPA Grand Challenge выиграл колесный кибер Stanley. Автопробег был организован американским Агентством содействия оборонным разработкам (DARPA) и проводился в пустыне Мохаве, штат Невада. Участникам пришлось преодолеть 240-километровую трассу по пересеченной местности. Автомобиль Stanley, созданный специалистами Стэнфордского университета на базе джипа Volkswagen Touareg, был оснащен мощным комплексом цифрового зрения и системой GPS, предназначенной для определения местонахождения. При медленном движении Stanley использовал систему лазерного сканирования, которая позволяла распознавать даже небольшие препятствия в радиусе 25 метров. Но этого не хватало для движения на большой скорости. Более того, лазерный дальномер принимает лужу за идеально ровную поверхность, из-за чего в прошлом году многие участники сошли с трассы: их машины выбрали путь через заполненные водой ямы. Для обнаружения крупных препятствий на значительном удалении и выяснения общего рельефа местности Stanley использует радиолокационную систему, которая способна распознать камень размером с ведро на расстоянии больше двухсот метров. Есть на машине и оптическая система, которая служит для поиска дороги и обнаружения мелких препятствий. Она сделана таким образом, что если какой-то участок дороги вызывает «подозрение», автомобиль снизит скорость и, подъехав поближе, либо «разберется», что же на этом участке происходит, либо объедет его. 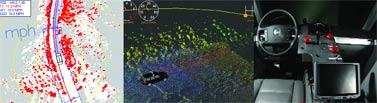 Даже такая сложная система зрения позволила победителю ралли развить среднюю скорость лишь немногим больше 30 км/час. Во многом это, конечно, связано со сложностью маршрута, но понятно, что до результатов настоящих раллийных пилотов роботам пока далеко. Своими руками: Пультсериал Автор: Сергей Ключко kobser@mail.ru Почти все средства дистанционного управления компьютером, продающиеся отдельно или входящие в комплектацию некоторых устройств, имеют недостатки. Это либо узкоспециализированные устройства, либо они имеют явно завышенную цену. Но сделать своими руками инфракрасный приемник, принимающий сигнал от любого ПДУ и позволяющий практически неограниченно управлять компьютером, вполне по силам любому человеку, знакомому с паяльником. В продаже есть фотоприемники, предназначенные для телевизоров, их можно прекрасно приспособить для наших нужд. Эта небольшая деталь включает в себя датчик ИК-излучения и усилитель. Питание для него можно взять из порта компьютера, на который и будем передавать данные. В COM-порту нет нужных нам 5 вольт, но есть сигнальные линии, выходной уровень которых близок к 12 вольтам, а тока вполне достаточно для нашей схемы. 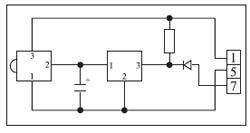 Всего нужны пять деталей. Самая дорогая — фотоприемник типа ТК-19 (TSOP1738, SFH56-38 и др. — С.Л.) — стоит 60 рублей. Еще желателен, но не обязателен стабилизатор напряжения (можно заменить 5-вольтовым стабилитроном. — С.Л.). Я взял 78L05, подойдет и отечественный КРЕН5A (точнее, КР142ЕН5А (В). — С.Л.), ценою 5 рублей. Остальные детали — сопротивление 4,7 кОм (для некоторых фотоприемников имеет смысл увеличить номинал до 10 кОм. — С.Л.), конденсатор 4,7 мкФ/10 В и диод КД521 или подобный. Понадобится также разъем для COM-порта типа «мама» (можно распотрошить старую мышь, будет не очень эстетично, но кто там за системным блоком видит…). Схема так проста, что не обязательно изготавливать для нее печатную плату, все паяется навесным монтажом и вставляется в любой подходящий корпус. У меня это баночка из-под фотопленки. Фотоприемник можно поместить снаружи на корпус нашего девайса или вывести на тонких проводках и приклеить двухсторонним скотчем к монитору. Теперь надо обработать сигналы, поступающие в компьютер. Для Linux есть нужный проект под названием LIRC. Он давно переведен на Windows-платформу и называется WinLIRC. К сожалению, у меня WinLIRC в связке с плейером Light Alloy (для управления которым я все и затеял) неважно понимал отдельные пульты, часто путал кнопки, поэтому я решил поискать что-то другое.  Другое нашлось в виде плагина к программеGirder. Сама программа — это шедевр. Позволяет все и еще чуть-чуть. Я остановился на небольшой, бесплатной и к тому же русифицированной версии 3.2. (Сейчас на сайте разработчика этой версии нет — программа стала платной. Но на отстойниках типа narod.ru, индексируемых всеми поисковиками, чего только не попадается. — С.Л.) К Girder написано множество плагинов, позволяющих сильно расширить ее и так безграничные возможности; нужный нам называетсяIgor SFH-56 Device. Никаких настроек не требуется, нужно лишь указать COM-порт и входящий сигнал. Правда, иногда попадаются пульты, высокая частота посылок импульсов у которых не позволяет фотоприемнику обработать их (вернее, порты, рассчитанные на 115 кбит/с, не в состоянии пропустить 400 кГц некоторых пультов. — С.Л.). Но у меня из четырех пультов, бывших под рукой, заработали все четыре. Подключаем собранное устройство к любому COM-порту, открываем Girder и настраиваем плагин на этот порт. Потом давим любую кнопку на первом попавшемся под руку ПДУ, не забыв направить его в сторону фотоприемника. Если в уголке окна программы индикатор изменил цвет на зеленый, можно поздравить себя с правильно сделанной схемой.  Создаем любую команду, нажимаем кнопку «Учить событие». В окошечке должна появиться комбинация цифр или букв, этот уникальный код как раз и определяет каждую кнопку ПДУ. Теперь подставляем для нашей команды любое событие из всего того богатства, что предлагает Girder, и наслаждаемся, глядя как компьютер реагирует на кнопки пульта. В комплекте с программой идет несколько готовых скриптов для управления популярными плейерами, где остается только подставить коды посылок от своего пульта. Girder позволяет производить какие угодно действия, вплоть до управления курсором мыши. Очень полезная возможность — назначение нескольких команд на одну кнопку. Можно, например, запустить программу, а потом закрыть ее, нажав два раза на одну кнопку. А в сочетании с дополнительными плагинами можно делать замечательные OSD-меню, позволяющие перемещаться по дискам, запускать приложения, переключаясь между ними, и т. д. Все это можно настроить и украсить как угодно, хоть в стиле а-ля Windows XP Media Center. Схема прекрасно работает при любой освещенности, даже если на приемник падает прямой свет, в отличие от устройства, описанного в статье «Пультяшный герой» («КТ» #623). КАФЕДРА ВАННАХА: Отчужденность Автор: Ваннах Михаил Никогда человеческая цивилизация не производила такого количества всевозможных материальных благ и разнообразной информационной продукции. Даже в пересчете на каждую душу из шести с половиной миллиардного населения планеты. Но прирастает ли в соответствующей пропорции людское счастье? Невиданным изобилием, как из рога Амалтеи, одаривает нас современная технология. За ней достаточно прочно закрепилось понятие — постиндустриальная. Но вряд ли этот термин точен. Ведь и кристаллы процессоров и памяти; и ботинки со штанами; да и сами булки, несмотря на некоторый прогресс в биотехнологиях на деревьях не растут. Их по прежнему выпускает промышленность, та самая индустрия. Ей нет замены — ни сейчас, ни в обозримой перспективе. Она не стала меньше по объемам. Производительность ее фантастически возросла. Так почему же общество так и хочется назвать ПОСТ-индустриальным? Две объективных причины. Рост производительности, внедрение массовых технологий, к которым в первую очередь относится микроэлектроника. И необходимость столь же массового спроса. Он уже вышел на уровень, когда может быть только глобальным. Именно этот императив порождает те забавные сценки, когда ИТ-миллиардеры, стойко радеющие за свободу слова внутри своих стран, пугливыми ланями кидаются исполнять требования авторитарных режимов третьего мира. Нет, они боятся не закупленного по дешевке на советских руинах оружия. Их страшит потеря огромного сегмента рынка, без которого хайтек действительно не может существовать. Этот же императив порождает отчуждение людей от индустрии. Еще лет сорок пять назад заводы электроники были довольно небольшими. Не говоря о глобальных масштабах, даже многие бараки социалистического лагеря, — Венгрия, ГДР, Чехословакия, — производили свои семейства вакуумных ламп и даже дискретных полупроводников, свои типы фотопленок. Завод был в своей стране, может и в своем городе. Его можно было видеть из трамвая. Сегодня производительность и кремниевых фабов, и заведений по литью кроссовок столь высока что во многих странах их просто нет. И никогда уже не будет! Откуда берется товар? Из коробки! Именно такова ментальность тех, кто его продает. Отсюда забавные сценки, возникающие при попытке задать так называемым продавцам-консультантам практически любой вопрос. Ученые, проектировщики, конструктора, технологи, наладчики — вот кто причастен сегодня к подлинному труду. Есть, конечно, еще низкооплачиваемые отверточные сборщики и упаковщики — но это и все. Для остальных — отчужденность от промышленного сердца глобальной цивилизации. И, похоже, именно она рождает очень многие из современных проблем. Вещи перестают быть предметом труда, того самого, на который были обречены Прародители; того, который по другой версии, сделал Царем природы гнусного краснозадого примата. Вот подлинная проблема. Для большинства людей невозможна радость творца вещи — отражение или усилий Творца или миллионолетнего труда эволюции. Остается лишь жажда вещей, как компенсация собственной отчужденности. Жажда, неизбежно подпитываемая маркетологами. И не из злобы — из того же экономического императива, на котором стоит глобальная технология. Доходит до абсурда. Среди жертв морозов января 2006 года (надо же, в России минус 30 — нечто необыкновенное!) не только бомжи, но и вполне обычные барышни. Пуховичок до талии; джинсы до ложбинки над ягодицами; кофточка, задирающаяся до лопаток. И полтора часа ожидания газельки на морозе. Завотделением, только перешедший на гражданку из госпиталя на Севере, рокочет, что при большой удаче спасет только почки. Так что мужчина девушек будет интересовать лишь как уролог, нефролог и прочий хиропрактик. Барышни защищаются — «Если б много платили, мы бы шуб и дубленок купили». Врач удивляется (до полярных островов сотовые операторы не доползли) — «У вас же купленные в кредит трехмегапиксельные телефоны со вспышками?» Девицы (античным хором) — «Но это же научно-технический прогресс!»… Вот они, герои и жертвы современной науки, своим здоровьем оплатившие функционирование глобальной экономики, обреченной запускать все новые и новые массовые изделия, и обеспечивать на них массовый же спрос. Жертвы легкие — чем человек отчужденнее от реальности, тем проще навязать ему мир мифов, где надо бояться упырей, врагов народа и шпионов; где продукт Чудо превращает закомплексованную квакшу в прекрасную принцессу. И это не проблема бедности — высокооплачиваемые белые воротнички норовят угробить себя, прыгнув впервые сразу на управляемом парашюте, который в советских ВДВ доверяли где-то после двух сотен спусков на учебных и десантных куполах. Не только в России — европейцы лезут на пятитысячники в кроссовках и с туристской схемкой-десятикилометровкой да компасом-брелком… Вряд ли отчужденность можно победить социально, перераспределив вещи, от создания которых человек был отчужден. Не надо уподобляться ларечным сиделицам, причитающим, ах, если б нам всем помногу платили… С отчужденностью человек может справиться лишь сам. И современная цивилизация, в первую очередь информационная, дает ему небывалый выбор степеней свободы. Которой были лишены люди недавнего прошлого, связанные и нуждой, и предрассудками. А воспользоваться ими или присоединиться к большинству — выбирать каждомц в отдельности! Terralab.ru: Canon PowerShot S80 Автор: Роман Фурин В конце минувшего года увидела свет камера Canon PowerShot S80, которая должна стать новым флагманом в классе фотоаппаратов PowerShot серии S. Впервые серия появилась осенью 1999 года, когда Canon выпустила PowerShot S10 и PowerShot S20 (двух— и трехмегапиксельные камеры соответственно). Каждая новая модель прибавляла себе еще один «десяток» в названии, особняком стоят лишь S1 IS и S2 IS. К модели S30 сформировался классический стиль корпуса, основные черты которого угадываются и в S80. Однако классическим был не только корпус, но и задачи, которые аппарат должен решать в своей потребительской нише. Все модели от S10 до S80 — это логическое развитие фотокамеры для любителя, идущее в ногу с прогрессом. Грубо говоря, это непрерывный апгрейд одного фотоаппарата, который, впрочем, уже несколько раз целиком поменял начинку, но все шесть лет радовал пользователей. Инженеры Canon сумели добиться на S80 такого качества видеозаписи, которое в 1999 году можно было видеть только на превосходных фотоснимках. Новый дизайн выглядит стильно. Прорезиненные бока корпуса и многофункциональный диск управления от «зеркальных» братьев из серии EOS радуют глаз (фото 1, 2). ***  ***  Технические характеристики логичнее сравнивать с моделью S70, которая вышла годом ранее. Габариты PowerShot S80 104x57x38,8 мм — камера на сантиметр короче предшественницы. На один мегапиксел увеличился 1/1,8-дюймовый CCD-датчик, теперь в нем 8 млн. эффективных пикселов. Процессор обработки изображения DIGIC II с использованием технологии iSAPS — один из главных козырей новинки, ведь он «снят» с цифровых зеркалок и обкатан на компакте PowerShot S2 IS. В совокупности матрица и процессор должны позволить печатать снимки формата А3+ без ухудшения качества. По заявлению Canon, автофокусировка стала на 20% быстрее, а качество фокусировки в условиях плохого освещения улучшилось на одну ступень. Непрерывная съемка может осуществляться со скоростью 1,8 кадра в секунду. Поддерживается 9-точечная система интеллектуальной автофокусировки AiAF. Камера оснащена объективом с 3,6-кратным оптическим зумом (28—100 мм в 35-мм эквиваленте, диафрагма f/2,8—5,3) и 4-кратным цифровым (14-кратное увеличение при комбинации оптического и цифрового зума). Для получения широкого угла при сохранении размеров объектива и камеры в конструкции объектива используются UA-элементы (Ultra High Refractive Index Aspherical — асферические линзы из литого стекла со сверхвысоким показателем преломления). При желании можно расширить диапазон фокусных расстояний с помощью адаптера и конвертеров к нему. При таком преобразовании диапазон фокусных расстояний может увеличиться до 22,4—200 мм. Фотоаппарат поддерживает следующие режимы замера экспозиции: оценочный, центрально-взвешенный интегральный и точечный (по центральной точке или рамке фокусировки). Экспозицию можно фиксировать и компенсировать (±2 EV с шагом 1/3 ступени), также есть возможность брекетинга автоэкспозиции (1/3—2 EV с шагом 1/3 ступени). Эквивалентная чувствительность ISO, помимо автоматического режима: 50, 100, 200, 400. Для наведения на цель можно воспользоваться как оптическим видоискателем реального изображения, так и 2,5-дюймовым ЖК-экраном (115 тысяч пикселов). К слову, у предшественника дисплей был 1,8-дюймовый с двумя уровнями регулировки яркости, а в PowerShot S80 уровней аж пятнадцать! Это позволяет комфортно снимать как в яркий солнечный день, так и в сумерках, ведь согласитесь, что в темноте чрезмерная яркость экрана режет глаза. С тринадцати до двадцати одного увеличилось количество режимов съемки, и теперь их список выглядит весьма внушительно: автоматический режим, программная автоэкспозиция, автоэкспозиция с приоритетом выдержки, автоэкспозиция с приоритетом диафрагмы, ручной режим, функция «Мои цвета» (My Colours) (девять параметров настройки), режим записи видеоклипов, особая сцена (портрет, ландшафт, ночная сцена, листва, снег, пляж, фейерверк, подводная съемка, съемка в помещении, дети и животные, ночное фото, цифровая макросъемка). Максимальный размер изображения вырос с 3072x2304 до 3264x2448 точек. PowerShot S80, к сожалению, утратил возможность записи в несжатом формате RAW, остался только JPEG (с Exif 2.2). Разрешение видеосъемки в 640х480 точек — не предел! Теперь можно снимать с разрешением 1024х768 точек со скоростью 15 кадров в секунду. Для подключения к компьютеру теперь используется скоростной USB 2.0 High Speed (Mini-B, PTP). Сменился формат карт памяти. Прежде был CompactFlash Type I/II, а теперь SD-карты или карты MutiMediaCard (кстати, в комплект входит SD-карта 32 Мбайт). Ко всему прочему, владелец фотоаппарата сможет обновлять прошивку самостоятельно. Мне приходилось пользоваться многими моделями серии S от Canon, и каких-то серьезных откровений в S80 я не увидел. Все идет по плану: размеры меньше, качество лучше. Во внешности и эргономике все тоже знакомо, плюс многофункциональный диск управления, находящийся на задней панели. Правда, колесо выбора режима съемки переползло с верхней панели на боковую. Не понравился только новый орган управления зумом. Он принял вид широкого рычажка, находящегося на задней панели, который надо перемещать вверх-вниз. Пользоваться им неудобно. Включается камера, как и раньше, — по открытию защитной крышки объектива, которая в исходном положении полностью закрывает объектив, вспышку, окно оптического видоискателя и подсветку автофокуса. Таким образом, жизненно важные органы фотокамеры надежно защищены. К сожалению, столь удобная крышка работает как пылесборник. И еще мне кажется, что внешность аппарата пострадает от царапин, которые крышка со временем начнет оставлять на левой половине передней панели. На PowerShot S60, например, через год активного использования от краски на этом месте не осталось и следа. Впрочем, главное ведь надежность, не так ли? ***  Цифровым увеличением стоит пользоваться лишь в крайнем случае. Качество картинки при сильном увеличении катастрофически падает. Если опять же не брать в расчет модели S1 и S2, то оптический зум выше 3,6 на «эски» не ставят. При таком относительно небольшом значении сильных геометрических искажений быть не должно, но все же они хорошо заметны (фото 3). На самом коротком фокусном расстоянии подушкообразная дисторсия приемлема для фотоаппаратов этого класса. И еще, пожалуй, следует отметить небольшое размытие по углам (фото 4). Но эта оптика уже доказала свою состоятельность в модели S70 (с которой начали устанавливать асферические линзы из литого стекла со сверхвысоким показателем преломления). Те, кто уже насладился ею, могут быть уверены в качестве оптики у нового фотоаппарата, а те, кто ждал обновлений, будут разочарованы, никаких новшеств за год не появилось. Программно можно включить ручной фокус, но я просто забыл об этой функции, так как автоматический фокус ни разу не дал повода усомниться в своей эффективности. Работает он действительно очень быстро. ***  Если снимать со светочувствительностью 400 ISO, то на длинных выдержках есть все шансы потерять детали в темных областях кадра, и хотя в таких условиях включается система подавления шумов, не факт, что она сильно поможет. Здесь могло бы выручить использование несжатого формата записи изображения RAW. Впрочем, я, наверное, чересчур избалован этим достижением цивилизации. Просто желая в полную силу использовать возможности несжатых файлов, я бы выбирал камеру классом повыше, а для этого, без сомнения качественного, любительского «компакта» такая функция не слишком важна. При значениях светочувствительности 50—100 визуальные показатели шума превосходны. А на 200—400 шум начинает резать глаз, такой кадр в большом формате уже не напечатаешь (фото 6—9). ***   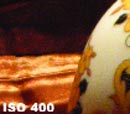 ***  В режиме «макро» на белом фоне первые кадры получались очень темными. Автоматический выбор баланса белого определялся не точно, а вот на ЖК-экранчике при нулевом (среднем) уровне яркости картинка выглядела даже немного выбеленной. Все разрешилось небольшим ручным вмешательством в баланс белого (фото 5). ***  Особый интерес вызывал XGA-режим видеосъемки с разрешением 1024х768. Запись ограничивается одним гигабайтом. Выбрав первый режим стабилизации изображения, я совершил прогулку по офису. Приятно удивил низкий уровень шума даже в затемненных участках изображения, а также четкость кадра, особенно если учесть, что в момент съемки я шел, а не стоял на месте. До видеокамеры, конечно, не дотягивает, но смотреть запись на телевизоре стало гораздо приятней. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 |
|||||||||